中国农业大学理学院应用化学系何雄奎教授团队在基于三维处方图的果园精准施药研究领域取得进展







文章导读
何雄奎教授团队开发了一种基于三维处方图的果园精准施药方法,利用多光谱无人机采集数据,实现精准冠层分割和离线处方图生成。试验显示,该技术降低农药消耗32.43%,提升喷雾均匀性。团队还验证了无人机在不同飞行高度下的处方图精度,树高测量优于冠层区域。此项研究获得国家梨产业技术体系及多个项目的资助,韩冷为第一作者,何雄奎为通讯作者。团队长期致力于智慧农业和精准施药技术,发表论文160余篇,获多项专利与奖励。
— 内容由好学术AI分析文章内容生成,仅供参考。
近日,理学院应用化学系、农业无人机系统研究院、药械与施药技术研究中心、智慧农业无人系统高水平创新团队何雄奎教授团队在农林科学领域国际权威期刊《农业中的人工智能》(Artificial Intelligence in Agriculture,中科院1区TOP)上发表了题为《基于无人机遥感的三维处方图变量施药》(PWM offline variable application based on UAV remote sensing 3D prescription map)的研究论文。该论文通过多光谱无人机采集果园三维多光谱影像,开发了一种精准冠层分割与三维重建的离线施药处方图生成算法,为基于三维处方图的精准施药作业提供任务精准规划。
果园精准施药技术通过精确匹配喷头输出与冠层参数,提升沉积均匀性与环境可持续性。本研究通过多光谱无人机构建包含地理信息的三维果树冠层处方图为农药精准施用提供参考(图1),团队研制了基于离线三维处方图的变量喷雾机并进行了田间验证(图2,图3)。结果表明,这种方法降低了23.43%的农药消耗并提升了冠层中的沉积均匀性,均匀系数由常规施药的0.31提升为0.35。同时,本研究测试了不同飞行高度对处方图构建精度的影响,无人机厂家提供的无控制点方法在较低的飞行高度下具有很高的海拔测量精度,飞行高度为30m时,地面区域的海拔测量RMSE为0.214m,MAE为0.211m,树冠区域分别为0.591m和0.541m。由于海拔测量均为出现了低估,因此树高的测量精度好于冠层区域海拔测量精度,树高的RMSE为0.398m,MAE为0.268m(图4)。在实施喷雾过程中测试了不同形状ROS对沉积的影响。线性ROS相较于圆锥ROS更加精准,具有更小的开启和关闭延时。田间试验表明,该离线变量施药方法实现了农药用量减少32.43%,同时提高了喷雾均匀性。新开发的工艺流程无需为每台喷雾设备配备昂贵传感器,具备田间应用潜力。本研究提供的基于无人机的农药精准施用流程具有很大的潜力,可以实现低成本的多机协同精准作业,进行高效,可持续的农药管理。未来针对喷雾延迟和生物学防效开展更多的研究。
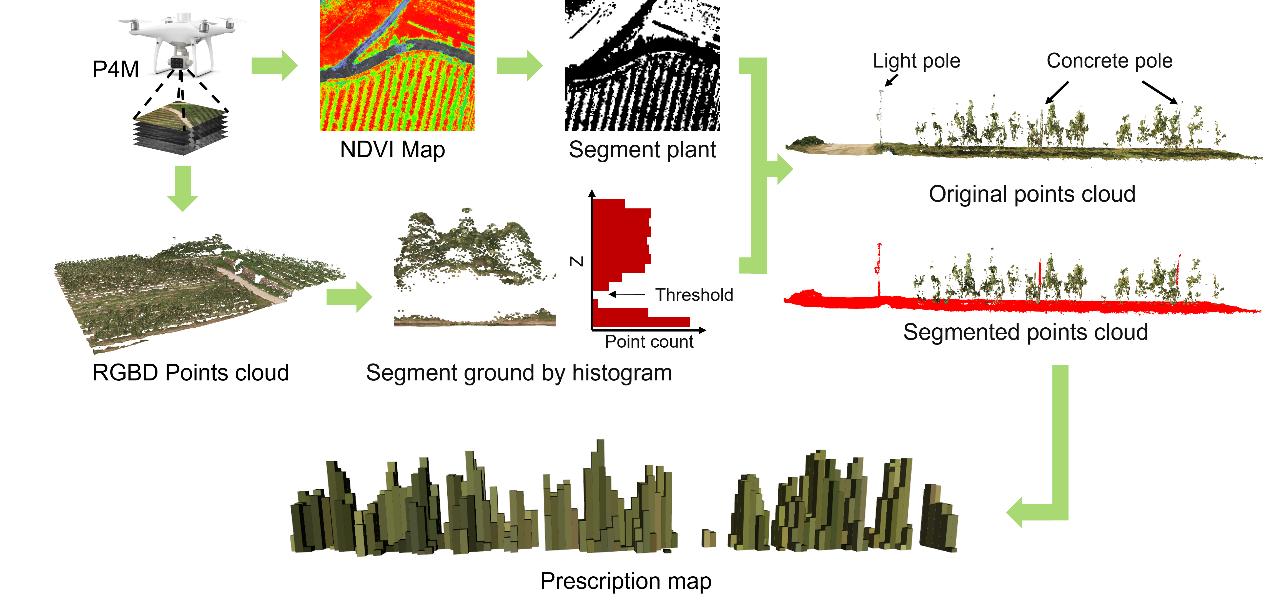
图1 三维处方图构建流程

图2 离线PWM施药机具
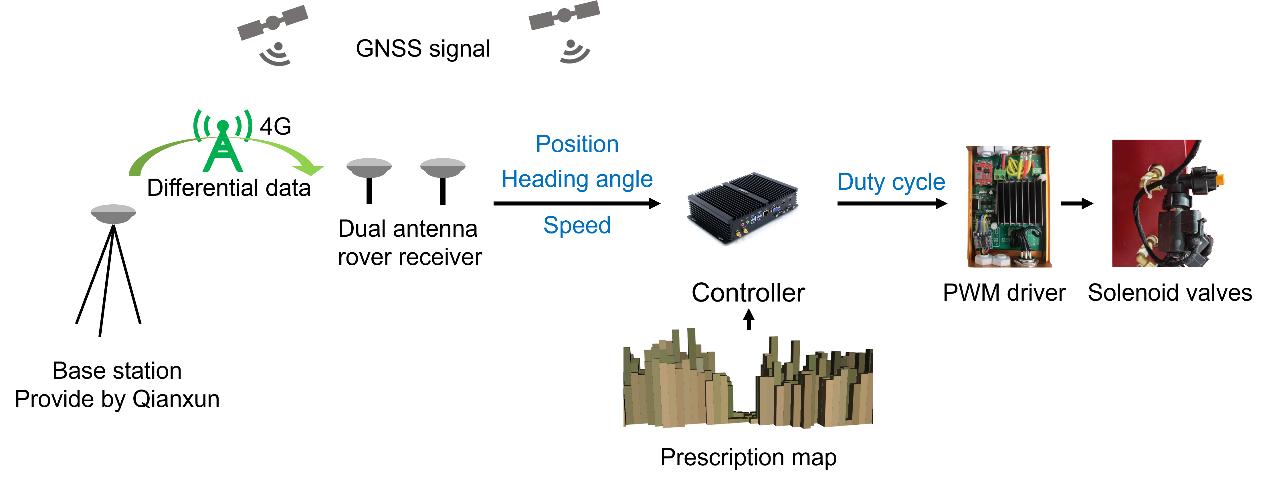
图3 喷雾决策流程
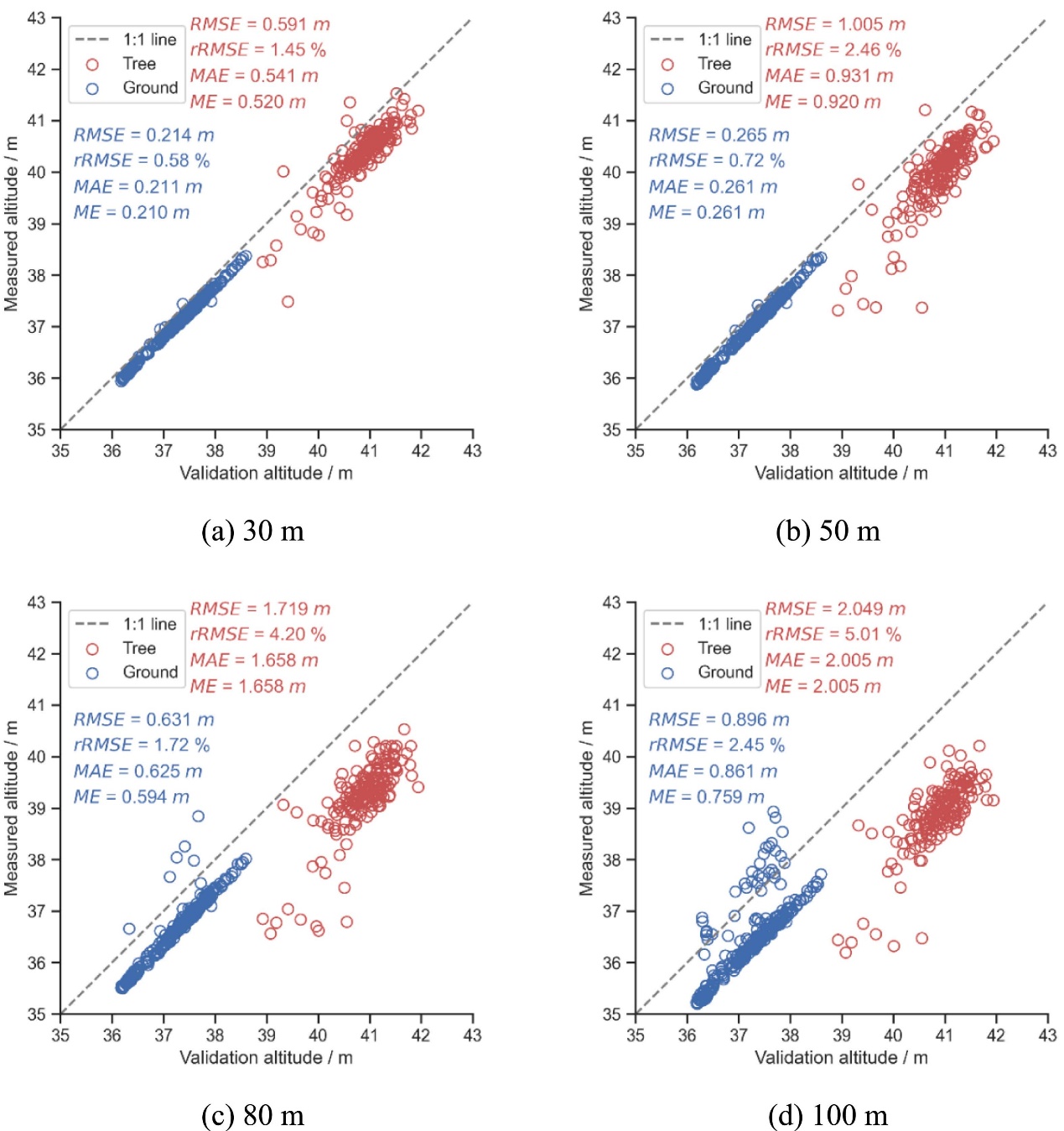
图4 不同飞行高度下的处方图构建精度
该项研究工作得到了国家梨产业技术体系(CARS-28)、中国农业大学2115人才培育发展支持计划以及三亚引导基金项目(SYND-2021-06)等项目的资助。中国农业大学为第一完成单位,理学院2021级博士研究生韩冷为论文第一作者,何雄奎教授为论文通讯作者。

何雄奎团队合影
近年来,理学院应用化学系何雄奎教授团队面向我国推进乡村振兴、建设农业强国的战略需求,以智慧农业无人系统、农药精准减量施用技术创新为核心,进行农业无人系统关键技术攻关、智慧农业应用场景构建、高效植保机械与精准减量施药技术和果树树体管理全程机械化技术推广应用,积极服务三农,团队先后主持20多项国家级研究项目,多项成果达到国内领先与国际先进水平,获省部级科技奖励一等奖2项、二等奖1项、三等奖2项,成功开发20多项新产品,获国家专利30余项,发表高水平学术论文160余篇,出版专著及教材9部,引领我国智能农业装备和植保机械产业高质量发展,为农业农村现代化提供坚实支撑。
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...