新研究提出电-力联合刺激系统助力提升类生命机器人驱动能力







近年来,由生命系统与机电系统在分子、细胞和组织等多尺度融合而成的类生命机器人迅速发展,并在组织工程、器官芯片和医疗等领域展现出应用潜力。
构建类生命机器人常用的生物材料包括心肌细胞、人工骨骼肌组织、昆虫背血管组织、微生物等。人工骨骼肌组织因具有良好的尺寸可扩展性、可控性和潜在的高驱动力而被广泛应用。
近日,中国科学院沈阳自动化研究所科研人员受人类骨骼肌训练模式启发,开发出电-力共刺激系统,可提升人工骨骼肌组织的驱动性能。
在人体中,骨骼肌组织从胚胎到成年,均受到神经电刺激和机械刺激的共同训练或维持。该团队模仿人类骨骼肌在神经电脉冲刺激下,克服外界负载进行收缩的自然训练模式,同时施加电刺激和动态机械刺激,以提升人工骨骼肌组织的蛋白分化率和收缩性能,实现类生命机器人的快速驱动。
实验结果表明,经过训练的人工骨骼肌组织蛋白分化率提升约50%,收缩力最大提升约98%,展现出与天然骨骼肌类似的成熟肌节机构。在低负载条件下,人工骨骼肌组织驱动部分的最大收缩应变可达18%,接近天然骨骼肌的收缩应变,表明其至少有一个维度接近天然骨骼肌性能。研究发现,这一人工骨骼肌组织驱动的仿毛毛虫机器人能够以最大2.38mm/s的速度运动,刷新了公开资料中由人工骨骼肌组织驱动的类生命机器人的速度纪录。
相关研究成果作为封面文章发表在《先进功能材料》(Advanced Functional Materials)上。研究工作得到国家自然科学基金和国家重点研发计划等的支持。
封面文章
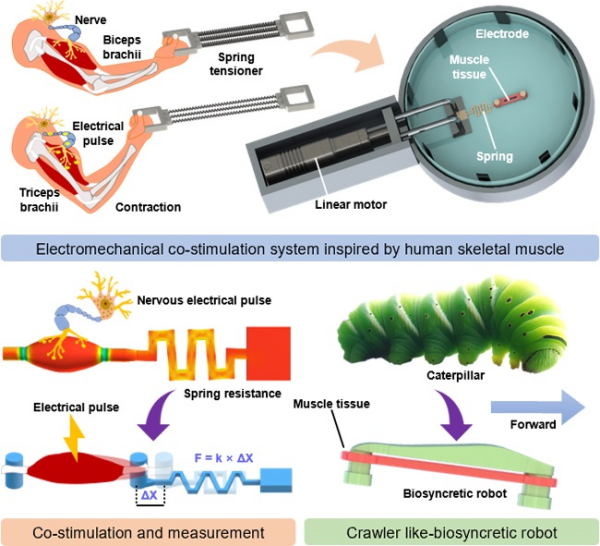
系统示意图
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...