







文章导读
你是否知道,数控加工中一次微小的轨迹偏差就可能导致整件报废?传统优化方法虽能保证精度,却常因计算滞后或不可行报错而中断加工。清华大学机械系胡楚雄团队最新研究成果打破这一困局:他们揭示了“最大化速度”不等于“最小化时间”的深层机理,提出全新的TOTP-SPLP优化模型,并构建具备可行性理论保障的分层次在线前瞻窗框架HLAW,首次实现数小时连续加工零报错。这项发表于《国际机床与制造杂志》的研究,让高速、高精、高稳的“边加工边规划”真正迈向可靠应用,为高端制造装备的智能化升级提供了关键支撑。
— 内容由好学术AI分析文章内容生成,仅供参考。
在高速高精数控加工中,轨迹规划的时间最优性、严格约束和在线规划稳定性是三个至关重要的性能,分别对加工效率、加工振动和实际可靠性有显著影响。实际应用中,商用数控系统通常要求轨迹光顺与插补支持在线执行,即“边加工边规划”,从而避免等待计算所引起的产率降低。目前,基于优化的轨迹规划方法能够严格遵循用户指定的约束,但面临两个挑战:一方面,计算成本和轨迹质量之间存在显著折中,在线优化方法难以在有限的计算资源内达成时间最优性;另一方面,现有主流在线轨迹优化框架缺乏约束可行性理论保证,从而制约了基于优化的轨迹规划方法走向可靠应用。
近日,清华大学机械系胡楚雄教授团队围绕数控轨迹规划问题的数学机理开展系统研究,提出新的优化问题形式,构建了一种新的在线轨迹优化框架,克服了基于优化的轨迹规划方法的在线性能和可行性两个方面的挑战,兼顾了时间最优性、严格约束和在线规划稳定性三个核心性能。在优化问题形式方面,研究团队指出传统在线优化方法“最大化速度”与实际加工目标“最小化时间”之间不等价,且广泛使用的伪加速度约束过分保守。在此基础上,研究团队建立了基于分段线性目标的序列线性规划方法的优化问题形式TOTP-SPLP,推进了计算成本与时间最优性之间的Pareto前沿。在在线轨迹优化框架方面,研究团队指出窗重叠区域内线性化点的不一致性导致在线优化问题不可行的机理,提出了具备约束可行性理论保证的分层次在线前瞻窗框架HLAW;所提框架能够兼容TOTP-SPLP及多个轨迹优化基线方法,并在数小时的数控加工实验中将传统在线优化框架的数千次不可行报错降低至零次。该研究为在线轨迹优化方法及技术在数控系统上的高效可靠应用提供了支撑。
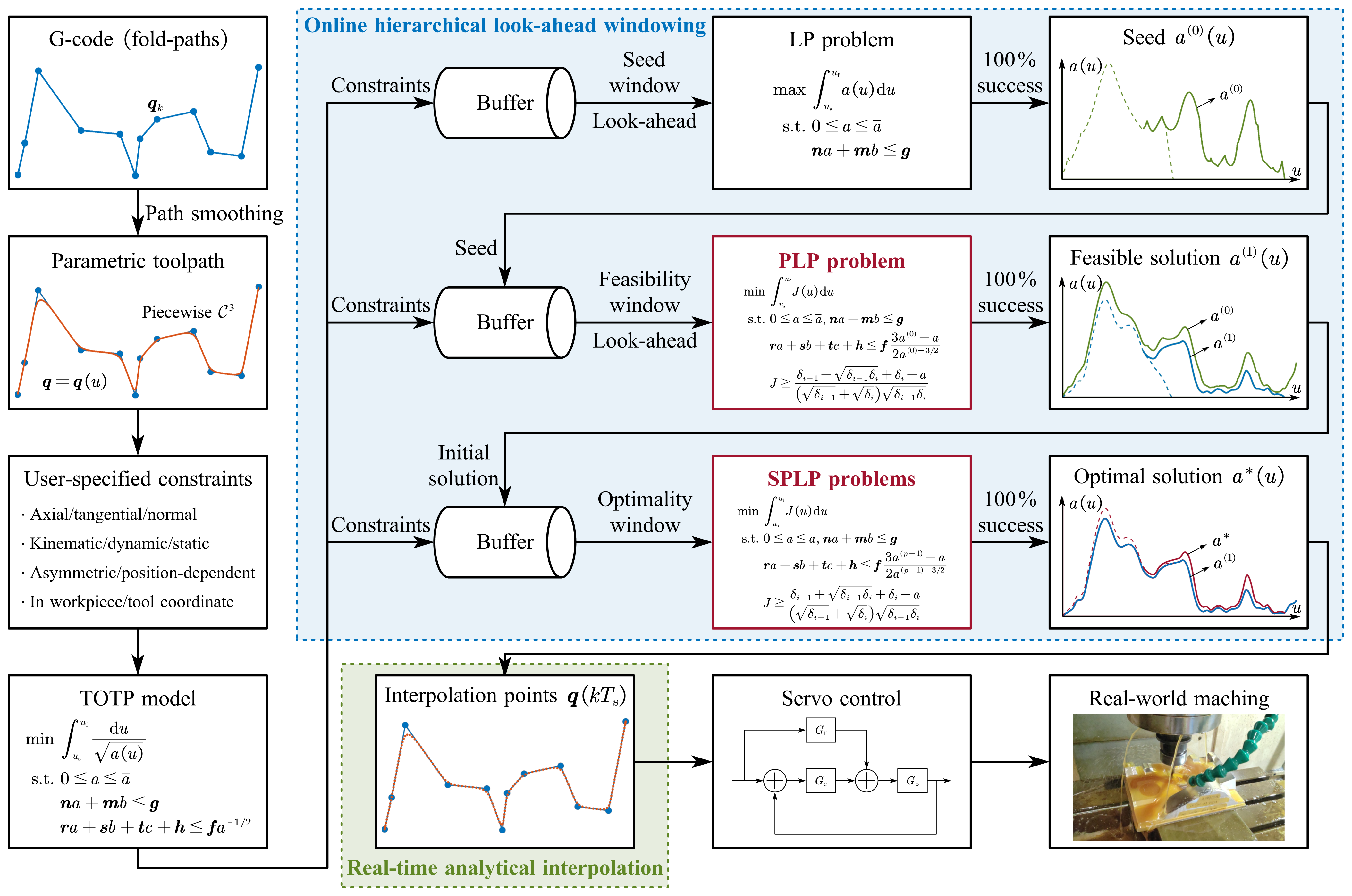
基于优化的在线轨迹规划框架HLAW-SPLP
研究成果以“具备严格约束与可行性保障的参数化刀路跟随时间最优在线轨迹规划”(Online Time-Optimal Trajectory Planning along Parametric Toolpaths with Strict Constraint Satisfaction and Certifiable Feasibility Guarantee)为题,于12月18日发表于《国际机床与制造杂志》(International Journal of Machine Tools and Manufacture)。
清华大学机械系胡楚雄教授团队2022级博士生王煜楠为论文第一作者,胡楚雄为论文通讯作者。研究得到国家重点研发计划、国家自然科学基金和北京市自然科学基金的经费支持。
论文链接:
https://doi.org/10.1016/j.ijmachtools.2025.104355
供稿:机械系
编辑:李华山
审核:郭玲
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。







相关文章




实验数据挺扎实,数小时加工零报错,看来可靠性确实提升了。👍
优化问题形式从“最大化速度”转向“最小化时间”,这个思路转变挺巧妙的。
论文发在IJMTM上,水平应该不错,坐等实际应用效果。
清华团队又在高端制造领域发力了,支持国产技术突破!
传统方法确实保守,新框架能降低不可行报错到零次很厉害。
听起来很专业,但具体怎么实现“边加工边规划”的稳定性?
计算成本和轨迹质量之间的折中问题确实是个难点,希望后续能有更优解。
这个研究对提升数控加工效率很有帮助,点个赞!