我国学者与海外合作者在机器人-动物交互研究方面取得进展






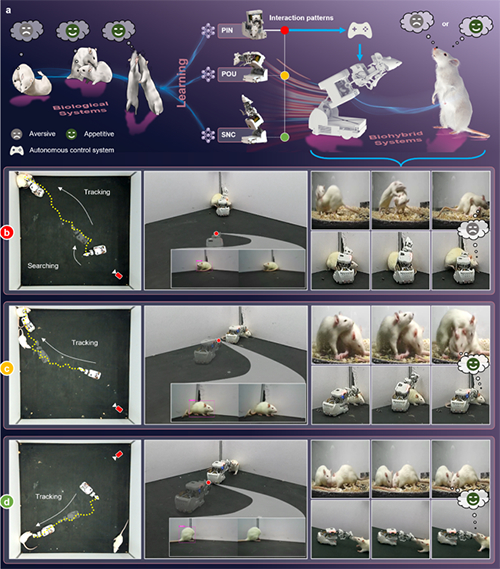
图 微小型类鼠机器人利用学习到的交互模式与大鼠互动并调控其情绪状态。(a) 基于学习的机器人-动物交互范式;(b)~(d)分别为机器人-大鼠按压(pinning)、攀压(pouncing)及鼻尖接触(social nose contact)这三种交互模式的示例
在国家自然科学基金项目(批准号:62022014、62088101)等资助下,北京理工大学石青教授团队与海外合作者开展交叉合作,在机器人-动物交互研究方面取得进展。研究成果以“通过类鼠机器人调控大鼠情绪状态(Modulating emotional states of rats through a rat-like robot with learned interaction patterns)”为题,于2024年12月5日在线发表于《自然•机器智能》(Nature Machine Intelligence)期刊上。论文链接:https://www.nature.com/articles/s42256-024-00939-y。
机器人以社交代理的形式融入生物系统,可作为观察者及刺激者与动物进行互动,有助于人类探索个体或集群动物如何对受控的环境变化做出反应。这种生机融合系统具备可控性,有助于阐明通过传统方法无法揭示的潜在生物智能。然而,现有交互机器人仍然难以在生机融合系统中传递多种感官信息,因此不能实现对复杂交互过程的有效调控,主要面临三个挑战:1)与动物的交流需要整合多种感官感知;2)为融入动物群体,需逼真模仿多样的动物复杂行为;3)如何直接改变动物的内部状态(如情绪)尚未深入探索。
该研究团队从大鼠的解剖结构、动态运动和社会互动中汲取灵感,研制了一款微小型类鼠交互机器人,可以模仿多种动物社会行为,自主地与大鼠进行社会互动。通过建立主运动关节映射模型,设计了高灵活多关节脊柱结构,利用模仿学习生成了四种社会行为模式,构建了自定义交互规则的自主控制架构。所提出的类鼠机器人实现了半小时内平均30次持续互动,且能吸引大鼠的注意力并显著激发它们的兴趣。
研究结果展示该类鼠机器人首次实现了对大鼠情绪状态的调控(图),克服了生物系统内自然社会交互的局限性,有望帮助揭示这些决策或预测背后的大脑功能和神经回路机制,为理解人类与人工智能之间的“社会”互动提供新思路。
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。






相关文章




暂无评论...