





文章导读
传统海洋机器人在复杂两栖地带和水下管道中常陷入困境。清华大学团队从海龟和蠕虫身上找到灵感,研发出两款突破性仿生机器人。仿海龟机器人融合视觉与触觉,能像生物一样实时识别并适应99%的复杂地形,让能效和速度分别提升19%与9%。仿蠕虫机器人则轻巧灵活,仅120克却能拉动近3倍自身重量的负载,并能跨越超过自身长度数倍的管道裂缝进行巡检。这些成果已登上顶级期刊封面并获得国际发明大奖,为未来水下探测与管道维护提供了全新的智能解决方案。
— 内容由好学术AI分析文章内容生成,仅供参考。
近日,清华大学深圳国际研究生院曲钧天副教授团队在海洋仿生软体机器人领域取得系列研究进展,通过模仿海龟、蠕虫等生物的高效运动模式,分别研发出面向复杂两栖环境的智能仿生两栖海龟机器人、面向水下复杂管道内部探测的仿蠕虫柔性管道机器人。系列研究均体现了“仿生智能”与“模块化设计”的前沿理念。仿海龟软体机器人通过多模态感知实现了环境智能适应,而仿蠕虫软体管道机器人则通过可重构模块化躯体突破了复杂非结构化空间的运动限制,分别为海陆两栖跨介质探测与水下管道内部巡检等复杂任务提供了高效、灵活的技术方案。
在陆地与水域交界的复杂区域,传统海洋机器人面临着严峻挑战。这些过渡区域通常由松软的沉积物、不规则的石块和不断变化的地形组成,使得依靠高速螺旋推进的传统系统容易出现效率下降、机动性受限甚至任务失败的情况。
面对以上挑战,曲钧天团队从海龟的运动中汲取灵感,研制出一款智能仿生两栖海龟机器人,该机器人采用三自由度仿生鳍肢与轻量化设计,并通过贝叶斯优化实现低功耗高效运动。其核心创新在于融合视觉与触觉信息,利用双流卷积神经网络进行地形实时分类,准确率高达99.17%,并据此实现动态步态自适应。该策略使机器人能效提升19.1%,运动速度提高9.2%,在复杂环境中表现出卓越的稳定性。
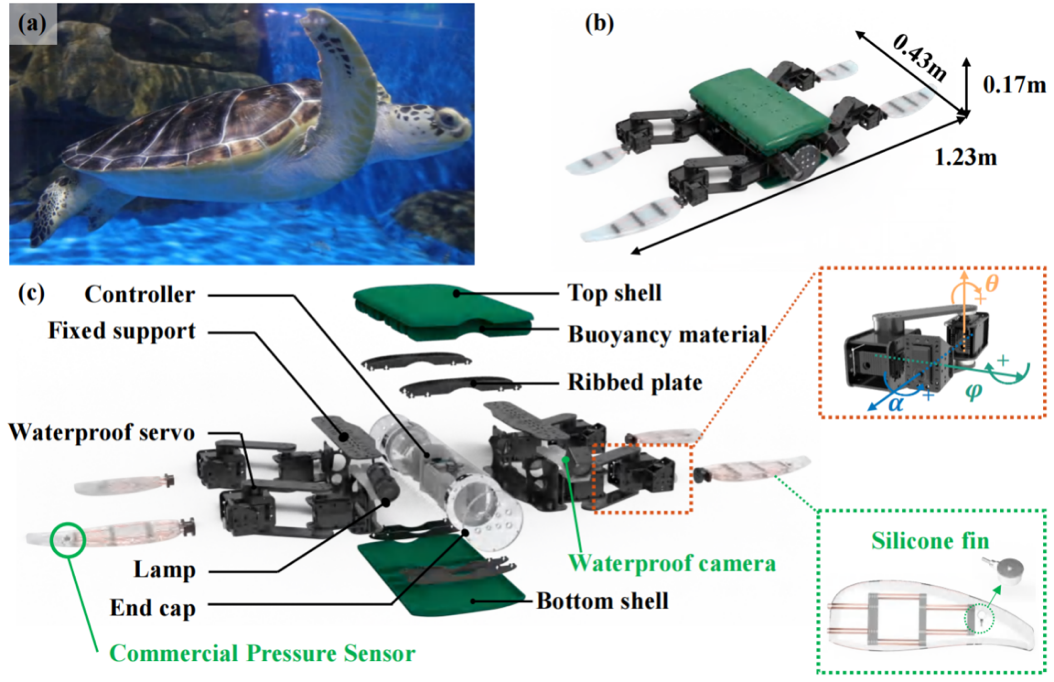
图1.智能仿生两栖海龟机器人:硬件配置与核心组件
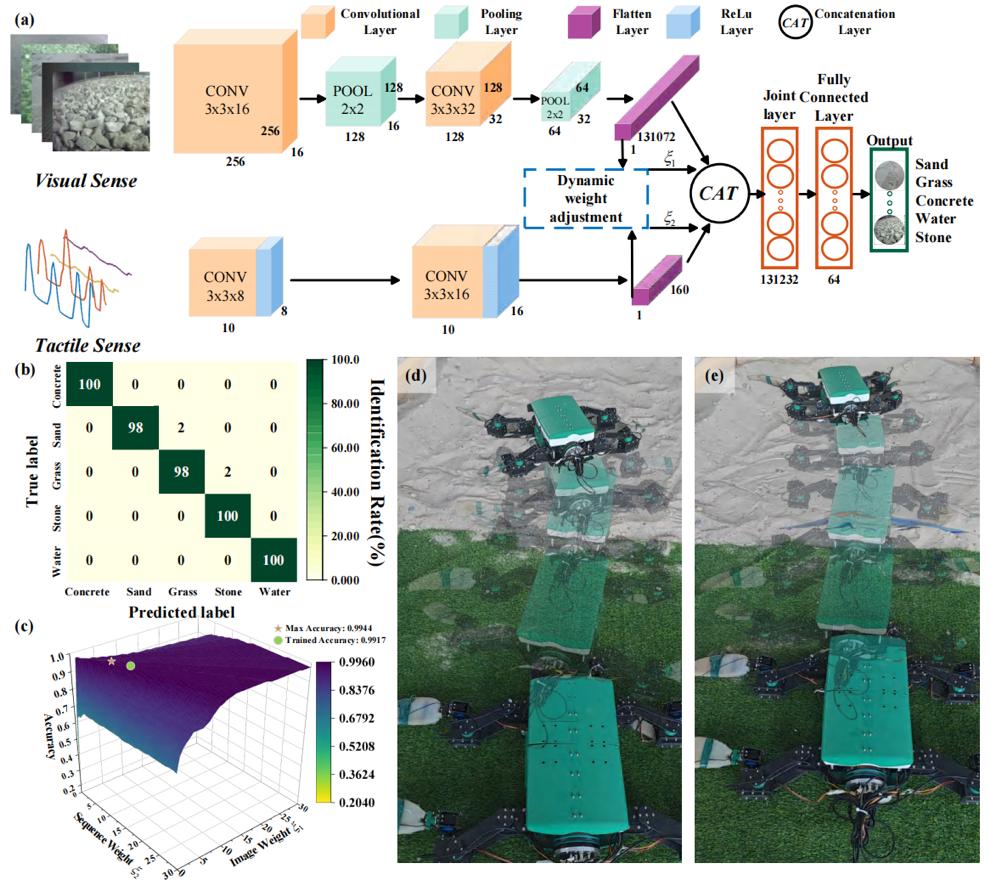
图2.地形识别框架

图3.户外测试
研究成果以“一种具备视觉-触觉融合能力的智能仿生两栖海龟机器人及其动态地形自适应方法”(An Intelligent Bionic Amphibious Turtle Robot with Visual-Tactile Fusion for Dynamic Terrain Adaptation)为题,发表于《IEEE机器人学汇刊》(IEEE Transactions on Robotics)。清华大学深圳国际研究生院2024级硕士生刘昂为论文第一作者,曲钧天和复旦大学研究员张壮为论文共同通讯作者。该成果还荣获第77届德国纽伦堡国际发明展银奖。

图4.项目成果荣获第77届纽伦堡国际发明展银奖
管道作为能源运输与城市运维的核心基础设施,其隐蔽性、复杂性给检测维护带来巨大挑战。传统刚性管道机器人结构复杂、控制难度大,在小管径、破损管道或动态水流等复杂工况下适应性受限;现有软体机器人虽具备灵活性优势,但普遍存在流阻大、负载能力弱、难以应对真实管道故障等问题。
面对以上挑战,曲钧天团队研制出一款磁吸式模块化仿蠕虫柔性管道机器人,该机器人创新性地采用星形三向锚定足与纤维增强波纹管主干设计,兼具纯柔性与高负载能力,重仅120克,却能在垂直管道中推动750克、拉动309.5克负载,并适应39-60毫米的变管径及0-90度管道倾角。其模块化磁吸设计支持快速构型重组,使三节构型可跨越25毫米缺口,五节串联构型更能跨越80毫米宽断裂缺口,搭载摄像头后,机器人可在复杂管道内部完成巡检任务。
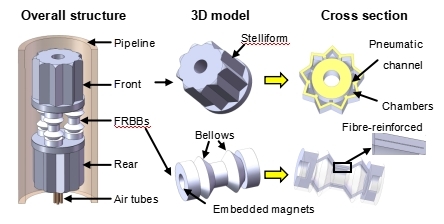
图5.软体管道机器人结构设计
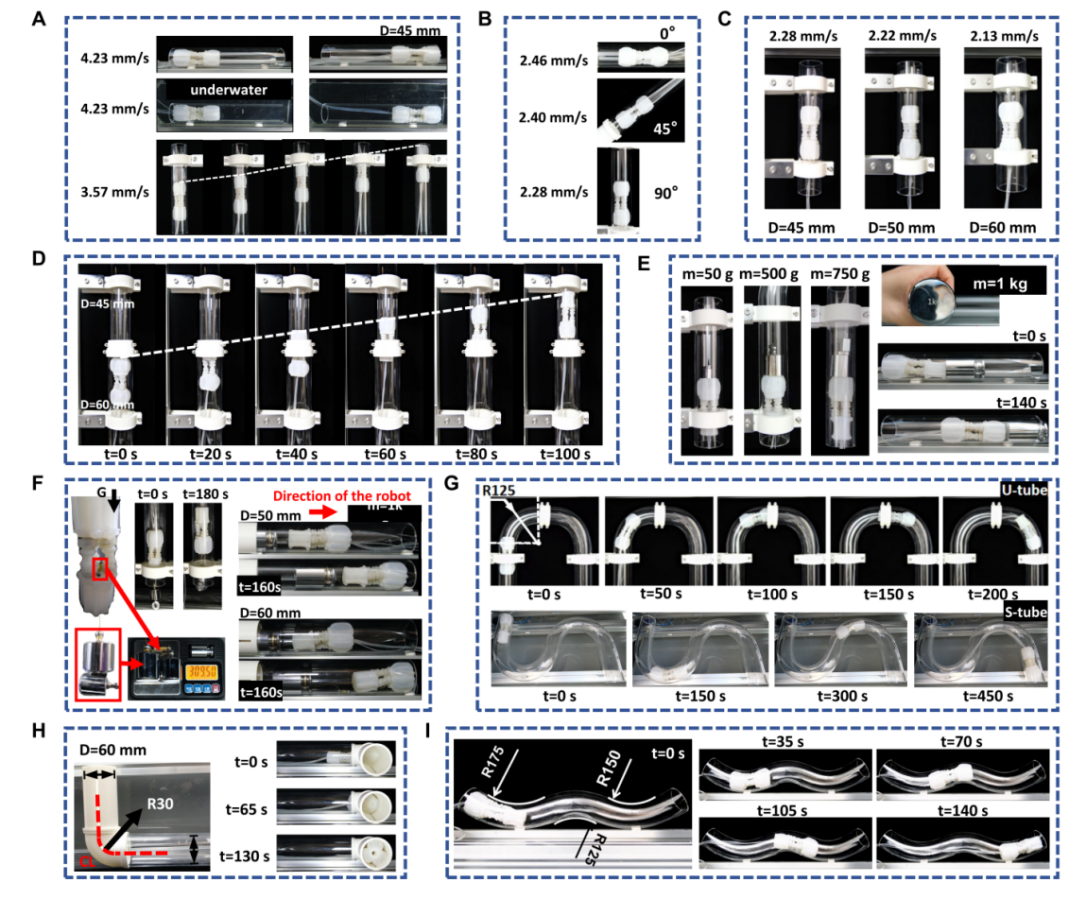
图6.应用场景演示
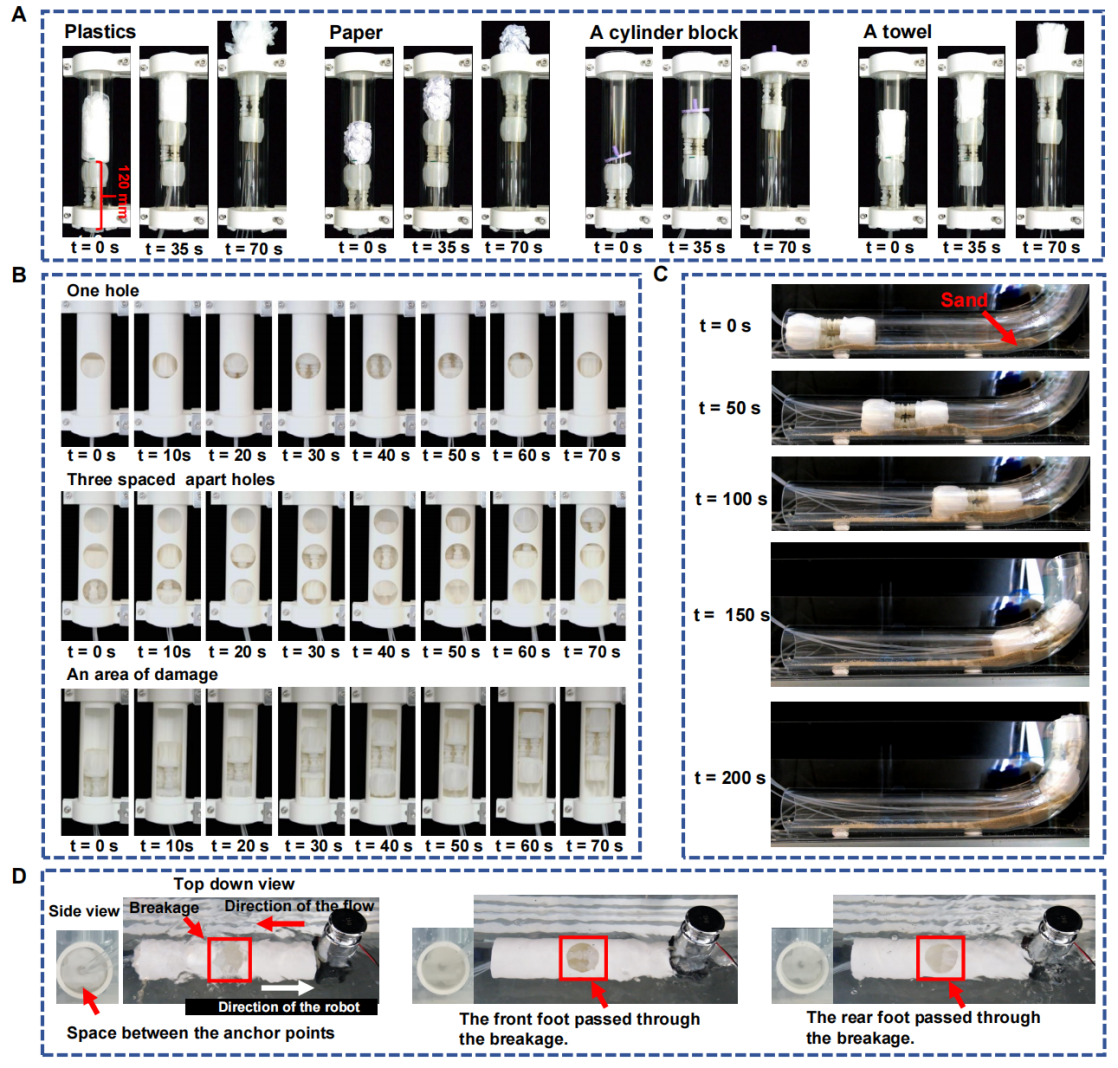
图7.应用场景演示
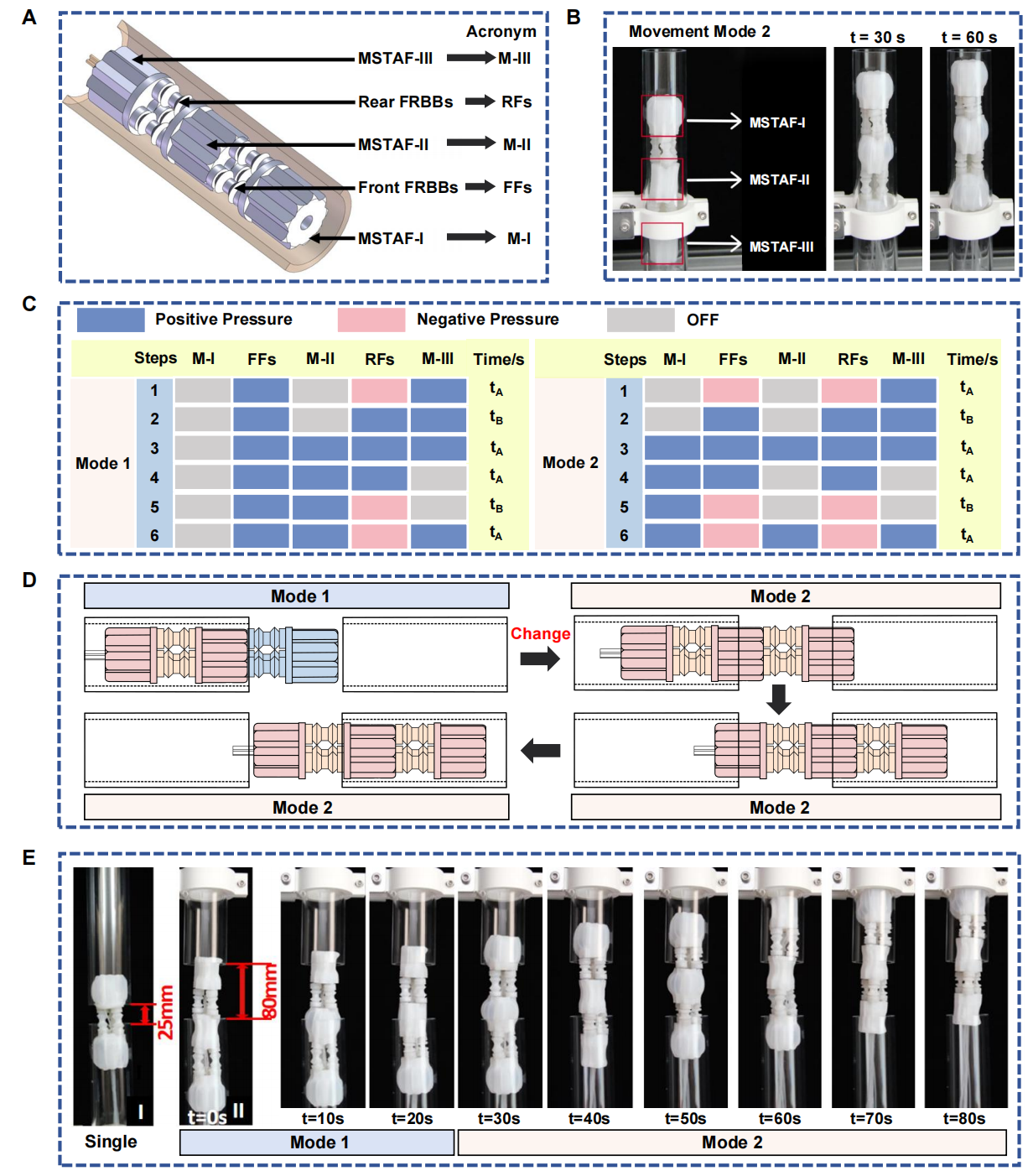
图8.应用场景演示
研究成果以“面向管道多场景探测的柔性模块化仿蠕虫机器人”(A Flexible Modular Worm-inspired Robot for Multi-scenario Explorations in Pipeline)为题,作为封面文章于1月21日发表于《细胞报告物质科学》(Cell Reports Physical Science)。清华大学深圳国际研究生院2023级博士生徐依宁为论文第一作者,曲钧天为论文通讯作者。论文共同作者还包括清华大学水利系教授徐梦珍。
图8.封面文章
论文链接:
https://ieeexplore.ieee.org/document/11219361
https://doi.org/10.1016/j.xcrp.2025.103038
供稿:深圳国际研究生院
编辑:刘芳芳
审核:郭玲
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



看不太懂但感觉很高级的样子
啥时候能实际应用啊?
搞科研的真不容易,天天跟管道打交道
能拉动比自身重好几倍的负载,厉害👍
这个仿生海龟机器人有点意思啊