







文章导读
你是否想过,仅用微弱磁场就能驱动软体机器人完成大幅变形?华中科技大学李亮团队正是突破了传统磁控驱动器“必须强磁场才能大变形”的瓶颈,受隐形眼镜翻转启发,首创融合双稳态结构与磁致失稳机制的新方法,在低至20 mT的弱磁场下实现形变率超0.8的快速可逆跃迁,且形变后无需持续供能即可自锁。这项发表于《自然·通讯》的成果,不仅颠覆了依赖高强度磁场的旧范式,更在微型医疗机器人、可编程材料与智能抓取系统中展现出巨大潜力,为低功耗、高响应软体驱动技术打开全新可能。
— 内容由好学术AI分析文章内容生成,仅供参考。
(通讯员 胡浩)11月5日,电气学院、强磁场中心李亮教授团队在磁控软体驱动器领域取得重要进展,破解了传统驱动器中“形变幅度与磁场强度强关联”这一瓶颈问题,实现了低磁场驱动的大幅形变调控。研究成果以“用于低磁场可编程大形变的磁控双稳态软体驱动器”(Magnetoactive bistable soft actuators for programmable large shape transformations at low magnetic fields)为题,在《自然·通讯》(Nature Communications)上发表。我校为论文唯一署名单位,博士生文昊为第一作者,李亮教授与曹全梁教授为共同通讯作者。
磁控软体驱动器凭借远程无缆操控与可编程形变能力等优势,在软体机器人及生物医学应用等领域展现出巨大的应用潜力。然而,传统驱动器受限于磁力矩与弹性恢复力矩持续竞争的形变机制,形变幅度与磁场强度强关联,导致“高场依赖”与“状态失稳”两大固有局限:实现大形变必须依赖高强度磁场的持续激励,且磁场撤除后形变无法维持,严重制约了驱动器能效与应用能力的提升。因此,如何突破现有力矩竞争机制,在低磁场下实现快速可逆大形变与状态自维持,已成为推动磁控软体驱动器技术创新发展的重要突破口。
针对上述挑战,受“隐形眼镜可轻松内外翻转”这一现象的启发,李亮教授团队提出融合半球壳型双稳态软体结构与磁致失稳机制的新型磁控形变方法,构建了以高磁矩单元(强磁场预磁化)和低势能差双稳态结构为核心的磁-力学耦合系统。在外部磁场作用下,通过脉冲磁力矩诱发结构失稳,驱动系统跨越双稳态间的能量势垒而实现形态调控。该策略巧妙利用结构自身的弹性能来主导稳态切换过程,而通过磁场作为瞬态的定向“触发器”,从而摆脱了对高强度磁场的依赖,实现了低磁场下驱动器形貌的大幅快速跃迁。
基于上述方法与机制创新,李亮教授团队在低至20 mT的弱磁场条件下,实现了形变率(形变高度与半径之比)超过0.8的大幅度形变,在驱动磁场强度与形变率两方面均显著优于现有同类驱动器报道水平(通常>100 mT磁场,形变率<0.5),且双稳态构型切换时间可低至0.1s以下。同时,团队开发了高流速软体隔膜泵、可编程重构的类超表面材料阵列以及仿海葵变刚度抓手等系列磁控软体驱动器应用系统,充分展示了该驱动方法在柔性驱动、可编程结构与智能操控等领域的广泛适用性。
该项工作实现了磁控软体驱动器从传统“持续强力矩竞争”到“瞬态低磁场触发跃迁”的形变调控机制转变,兼具低场驱动、状态自锁、瞬时跃迁等核心优势。这一突破为在体内医疗机器人等空间受限的应用场景中实现“低能量输入、强力场输出”提供了新思路,对于双稳态/多稳态结构融合的先进软体驱动器设计具有启发意义,并将推动微型化、低功耗软体驱动器技术的实用化进程。
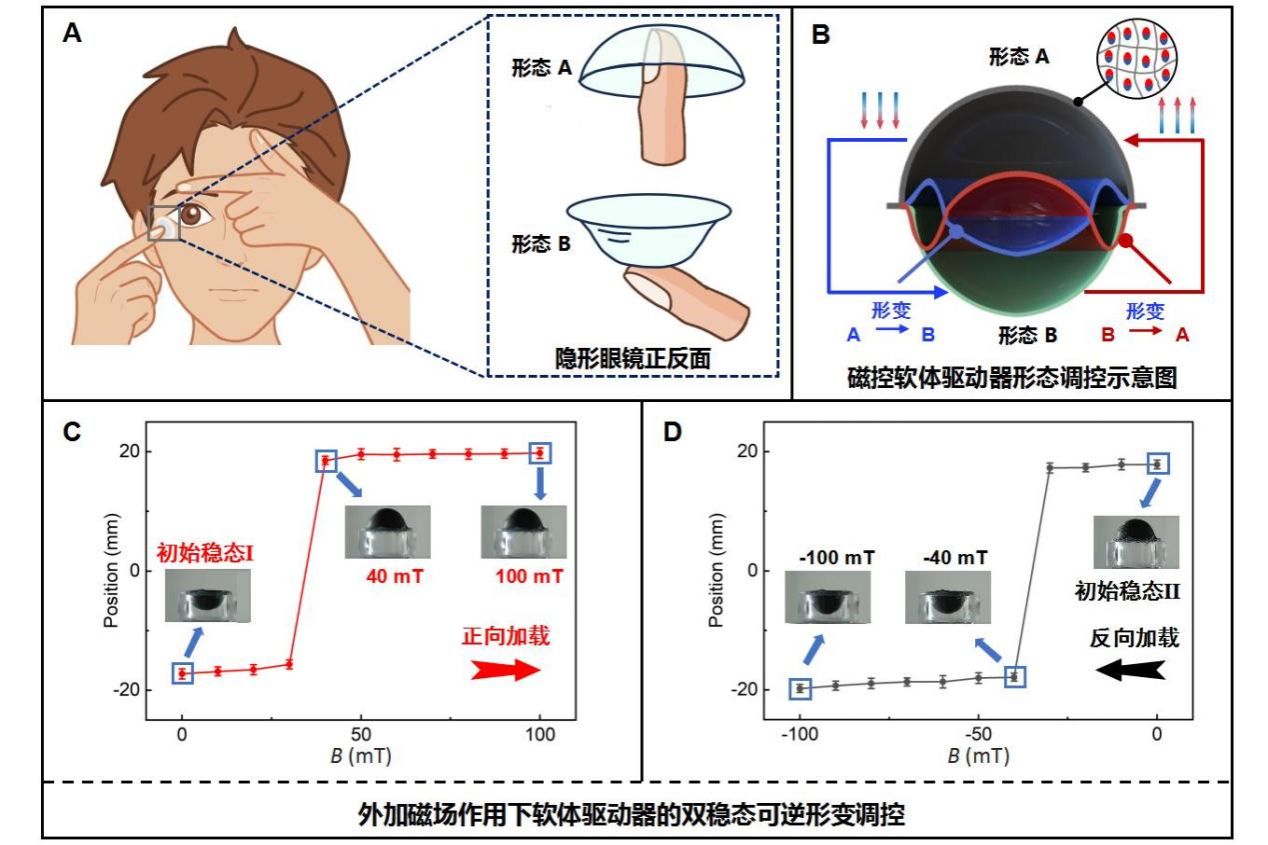
图1. 磁控双稳态软体驱动器设计思路和双向可逆形变调控图
图2. 磁控双稳态软体驱动器在不同磁场频率下的动态响应特性图
李亮教授团队长期致力于强磁场基础理论、关键技术与应用研究,牵头建设“十一五”脉冲强磁场实验装置和“十四五”脉冲强磁场实验装置优化提升两项国家重大科技基础设施,建成国际领先的脉冲强磁场大科学设施,实现了我国超强磁场极端条件从无到有、从跟跑到领跑的跨越。团队荣获2019年国家科技进步一等奖、2018 年湖北省科技进步特等奖和2022 年湖北省技术发明一等奖,并入选“全国专业技术人才先进集体”和“中国青年五四奖章集体”等荣誉称号。
团队紧扣国家和行业重大需求,依托大科学设施,积极开展强磁场前沿应用技术研究,在大型永磁装备原位充退磁、电磁成形制造、磁控机器人及生物医学应用等多个交叉领域取得系列突破,相关工作发表于Nature Communications、Science Advances、International Journal of Machine Tools and Manufacture以及IEEE系列等国内外高水平期刊,并指导学生荣获中国国际大学生创新大赛全国金奖(2024年、2025年)、全国大学生机器人科技创新交流营暨机器人大赛特等奖等荣誉。

论文链接:https://doi.org/10.1038/s41467-025-64855-4
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章




暂无评论...