






文章导读
如何让太空“捕手”在高速碰撞中既稳准抓取又能轻松释放?上海交大张文明教授团队揭秘一项仿生黑科技:受壁虎启发,团队创新提出序贯相变粘附策略,利用形状记忆聚合物的智能相变特性,在千分之一秒内完成吸能缓冲、强力锁附与低耗分离的三重切换。该技术使动态捕获效率提升6倍,抗冲击动能超3800J/m²,并已通过微型机器人漂浮试验验证。这项发表于《Science Advances》的成果,或将彻底改变空间碎片清理与在轨服务的未来格局。
— 内容由好学术AI分析文章内容生成,仅供参考。
近日,上海交大机械与动力工程学院振动、冲击、噪声研究所张文明教授团队提出了一种基于序贯相变粘附的动态捕获策略,为航天微重力环境下非合作目标的柔顺高效捕获提供了新的解决方案。研究成果“Dynamic capture enabled by sequential phase-switching adhesion”发表在期刊Science Advances上。博士生李若章为论文第一作者,张文明教授为通讯作者。
近年来,受壁虎启发的仿生粘附材料在智能制造、机器人、柔性电子、生物医学等领域展现出良好的应用前景。而在航天工程领域,动态粘附捕获技术有望突破传统机械捕获的限制,为空间碎片清除和在轨检修等应用场景提供新方案。然而,要在高相对运动、短接触时间和复杂碰撞条件下实现可靠的动态捕获,并满足多阶段任务需求,仍面临关键科学与工程难题。当前的技术路径主要依赖复杂的机械缓冲与传感控制系统,既增加了系统体积与重量,也无法在极短的碰撞时间内实现界面保护与高效能量耗散,成为制约动态粘附实际应用的主要瓶颈之一。
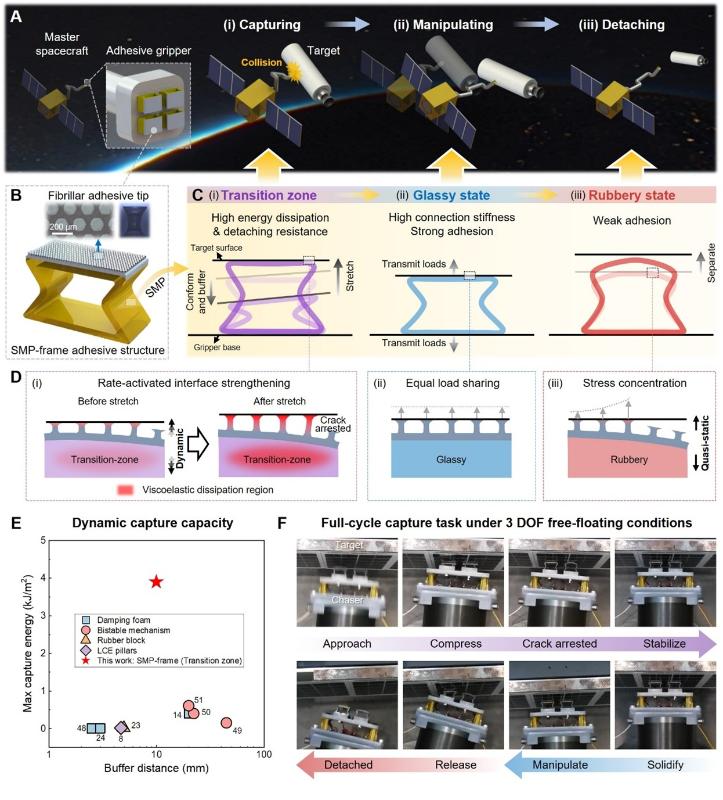
针对这些挑战,研究团队利用形状记忆聚合物(SMP)智能材料的相变可调特性,将材料力学性能与捕获任务多阶段需求进行精准匹配。在捕获碰撞阶段,SMP置于高粘弹性特性主导的过渡区,能够完成高效冲击能量耗散并延缓界面裂纹扩展,实现可靠抓捕;在操控阶段,SMP切换至坚硬的玻璃态,提供高连接刚度与强界面粘附力,确保稳定精准搬运和转移;在释放阶段,SMP进入柔软的橡胶态,降低粘附强度,实现低能耗、可控分离。基于该调控策略,研究团队设计了由仿生微结构粘附层和SMP框架型背衬层构成的复合型智能粘附结构。实验表明,该结构可在单位面积动能超过3800J/m²的高能碰撞中实现稳定捕获,其性能较目前的动态粘附捕获系统提升约6倍,并表现出良好的柔顺适应性、抗反弹能力和循环复用性。研究团队进一步将该智能粘附结构集成于微型捕获机器人前端,并在地面自由漂浮环境下开展了全流程动态捕获模拟试验,验证了其在航天微重力环境中的可行性与稳定性。
该研究不仅为航天非合作目标捕获任务提供了全新的技术路径,也为仿生粘附材料在高动态场景下的应用开辟了新方向。未来,该技术有望在空间在轨服务、智能飞行机器人、工业生产线装配等领域发挥重要作用。
该研究工作得到了国家自然科学基金项目的资助。
论文链接:https://doi.org/10.1126/sciadv.adz7566
作者: 振动、冲击、噪声研究所 供稿单位: 机械与动力工程学院
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...