






文章导读
如何让机器人在毫米级狭窄管道中如鱼得水?上海交大杨斌团队带来突破性进展:一款仅需3V低电压驱动的超声微型机器人,速度高达81 cm/s,可在弯曲、不同材质的细小管道中实现超快速双向导航,并具备强劲爬坡与负载能力。更可搭载内窥镜实时成像,为工业检测与医疗应用打开全新可能。这项曾被《Nature Reviews Electrical Engineering》 spotlight 的技术,究竟如何颠覆传统检测困局?
— 内容由好学术AI分析文章内容生成,仅供参考。
近日,上海交通大学集成电路学院(信息与电子工程学院)智能感知与生物医学微系统实验室杨斌研究员团队,针对微型狭窄管道环境探测,提出了一种超声微型机器人设计,相关成果以“An Ultrasonic Microrobot Enabling Ultrafast Bidirectional Navigation in Confined Tubular Environments”(可在密闭管状环境中实现超快速双向导航的超声微型机器人)为题发表在《Nano-Micro Letters》上。
研究背景
管道作为石油化工、发电、核能及医疗保健等行业输送气体、液体的重要通道,随着使用时间延长,常因老化、腐蚀、堵塞或损坏而需要定期检查。然而,许多管道内部空间狭窄且几何结构复杂弯曲,常规检测方法难以进入,带来巨大挑战,催生了对新型检查技术的迫切需求。近年来,微型机器人被视为管道检测的潜在方案,并涌现出多种驱动方式,包括磁场、气动、介电弹性体、电磁、电化学、光能及压电驱动等。但各类方式受限于驱动条件和结构尺寸:气动或电机驱动仅适用于大管径,磁驱动受铁磁管道限制,光驱动难以在不透明管道应用,介电弹性体驱动需要数千伏高压。因而,研发一种能在狭窄密闭管道中低电压驱动并高速导航的微型机器人,仍是亟待解决的关键问题。
创新成果
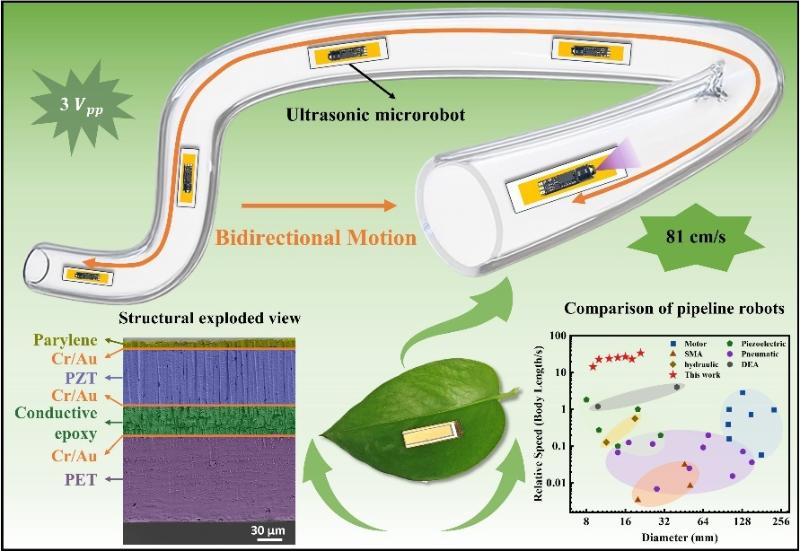
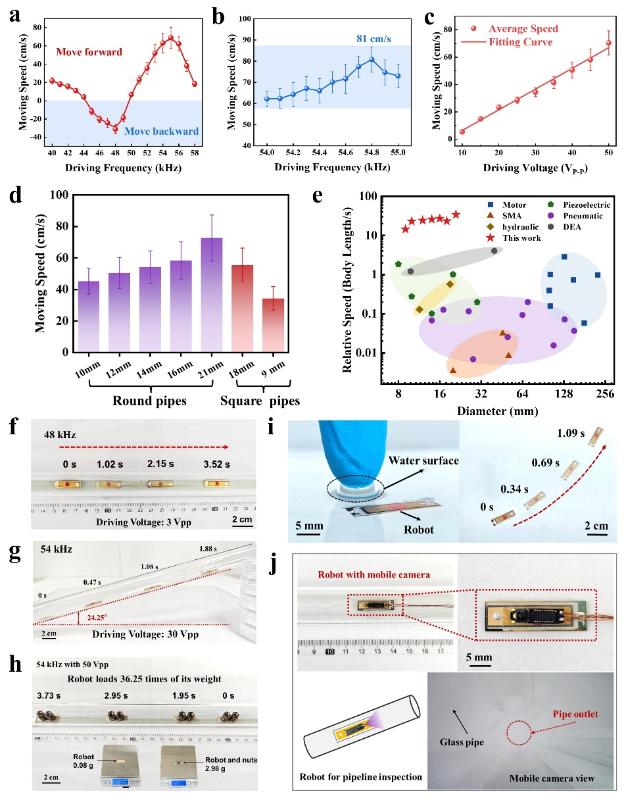
该研究提出了一种基于MEMS工艺的超声驱动微型机器人,其核心优势在于低电压驱动(3 Vpp)、高速双向运动(81 cm/s)、强爬坡(24.25°)与承载能力(超过自重36倍)。机器人可在毫米级狭窄管道、弯曲管道、不同材质管道及水面环境中灵活运行,并可搭载微型内窥镜实现实时检测,在微型管道检测中展现出巨大应用潜力。
超声微型机器人的设计
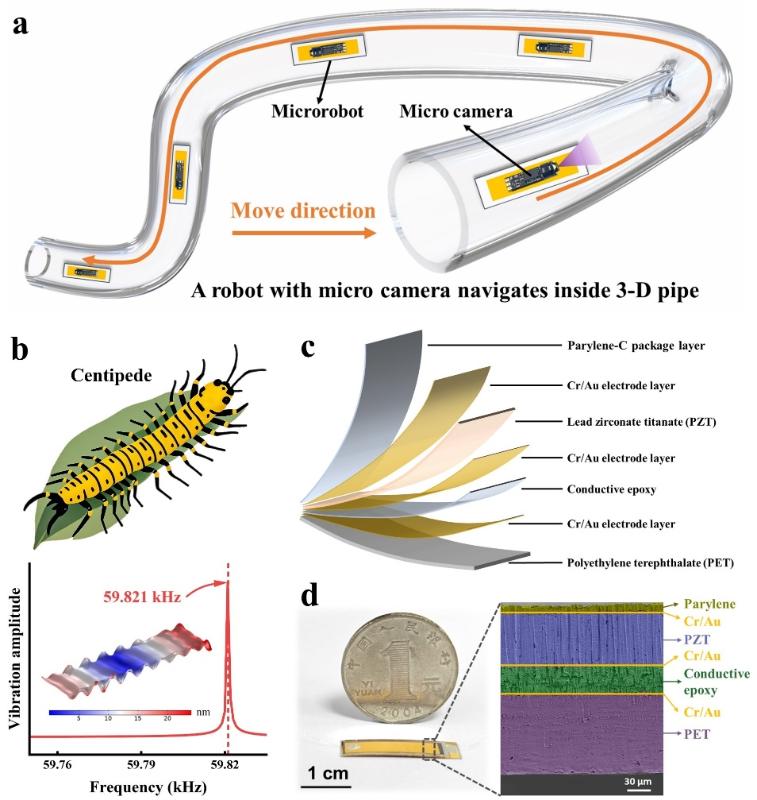
该微型机器人依托高性能PZT压电薄膜在交变电场下的快速伸缩变形实现驱动,超声频率可激发高阶弯曲模态,使主体产生波浪状运动,并在与管壁摩擦耦合下将微观振动转化为宏观高速运动。实验结果表明,在约54.8 kHz谐振频率下,机器人运动性能最佳,速度可达81 cm/s。通过调节驱动频率,机器人能够在不同模态下实现前进和后退的切换。机器人的驱动电压与速度呈近似线性关系,进一步证明了压电驱动在能量输入与运动性能之间的高效转换能力。
进一步实验表明,该超声微型机器人在不同直径管道中均具备良好适应性,且速度性能远超其他驱动原理管道机器人。其最小驱动电压仅3 Vpp,远低于介电弹性体和多数压电机器人,展现出高效的能量利用率。同时在爬坡、负载性能中展现卓越稳健性和性能优势。该机器人还可在水面上开展运动,并可搭载微型内窥镜摄像头开展管道内实时成像检测,验证了机器人执行微型管道巡检任务的可行性。
超声微型机器人的性能表征、对比及应用测试
总结与展望
该研究报道了一种基于超薄压电复合结构的超声微型机器人,具备低电压驱动(3 Vpp)、高速运动(81 cm/s)、双向可编程导航及优异的爬坡和承载能力。其可适应直径9–27 mm的多种管道,并在弯曲管道及水面环境中稳定运行。与其他驱动方式相比,该机器人在速度、能效和环境适应性方面更具优势。通过集成微型内窥镜相机,验证了其在管道检测中的潜力,未来结合电源与通信模块有望实现无线自主应用。
相关论文被《Nature Reviews Electrical Engineering》作为research highlights报道。
论文信息
崔猛(左)、杨斌(右)
上海交通大学集成电路学院(信息与电子工程学院)博士生崔猛为论文第一作者,集成电路学院(信息与电子工程学院)杨斌教授为论文通讯作者。该工作得到了国家重点研发计划、国家自然科学基金、上海交通大学医工交叉重点基金等项目资助。
杨斌,上海交通大学集成电路学院(信息与电子工程学院)研究员,博士生导师。研究领域涵盖智能柔性感知微系统、MEMS压电传感-驱动器件、压电超声换能器、压电微机器人等。先后主持国家重点研发计划课题、国家自然科学基金、装备预研教育部联合基金等项目。
作者: 集成电路学院(信息与电子工程学院) 供稿单位: 集成电路学院(信息与电子工程学院)
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...