






文章导读
如何让激光雷达既看得远又扫得快?清华大学尤政院士团队带来突破性方案!他们利用可调级联超表面,巧妙融合扫描式与闪光式雷达优势,通过偏振控制在高精度点阵扫描和高效全局成像间自由切换。结合自适应三维重建,系统能智能调整分辨率,兼顾速度与细节。这项轻量化、高集成度的新技术,有望破解自动驾驶、机器人感知中三维探测效率与精度难以兼得的难题,为下一代激光雷达开辟全新路径。
— 内容由好学术AI分析文章内容生成,仅供参考。
近日,清华大学精密仪器系尤政院士团队提出了一种基于混合级联平动超表面的双模式激光雷达系统。该系统利用几何相位与传播相位超表面级联调控,通过调制光的偏振状态,在高精度波束扫描模式与高效闪光照明模式之间灵活切换,适应不同场景下的三维感知需求。结合自适应三维探测能方案,可动态调整探测模式与分辨率,成功弥合了传统单一扫描式与闪光式激光雷达的技术局限,为高效、紧凑且具备更强环境适应性的三维感知提供了新途径。
在主动三维成像技术中,激光雷达因其具备直接测距、高空间分辨率和强环境适应性的优势,已广泛应用于自动驾驶、机器人感知和高精度测绘等领域。根据光束覆盖方式的不同,现有激光雷达系统主要分为扫描式和闪光式两类。扫描式激光雷达主要借助机械部件逐点扫描目标,具有精度高、探测距离远的特点,但探测速率受限;闪光式激光雷达则采用一次性照明的探测方式,具备高探测效率的优势,但在成像精度和探测距离上存在不足。如何实现兼顾高精度、远距离和高效率等指标需求的激光雷达,促使研究者不断探索新型光束调控方法。近年来,随着纳米光子学的发展,超表面技术因具备高精度、多通道光束调控能力和轻薄易于集成的特性,为激光雷达系统的多功能化、小型化提供了全新解决方案。
为突破现有技术瓶颈,尤政院士团队研发出一种双模式光束调控器件,将可调谐混合级联超表面与形状记忆合金微致动器相结合,融合了点阵扫描与闪光成像的优势,可根据探测需求在高分辨率点阵扫描模式与单次均匀照明模式之间灵活切换。相比现有方案,该技术能有效兼顾探测分辨率、视场范围与探测效率等关键指标,能够满足复杂环境下的高精度三维探测与快速全局感知需求,为新一代激光雷达系统、自主导航以及先进三维成像技术的发展提供了新思路。
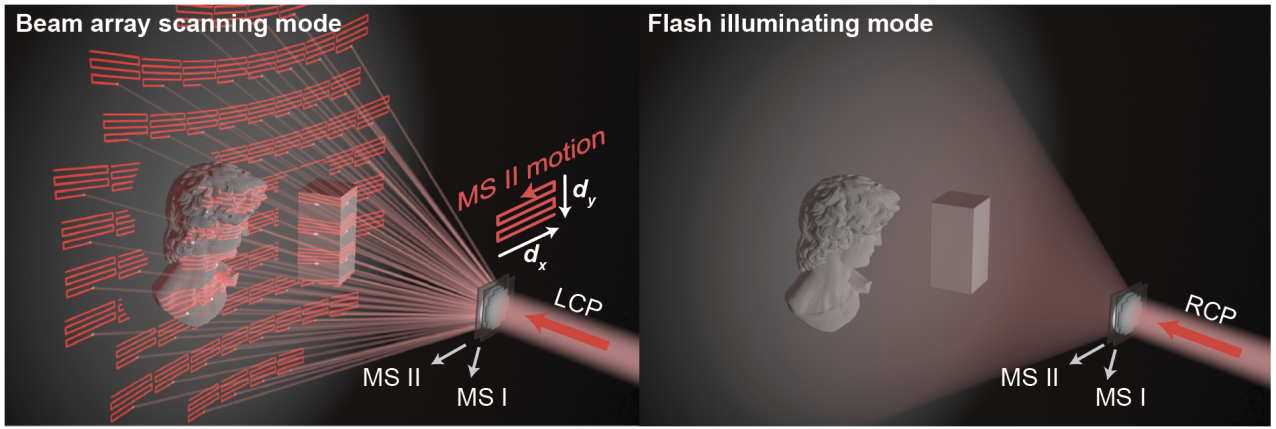
图1.基于混合级联平动超表面实现的双模式三维探测原理图
通过控制入射光的偏振态,即可实现两种光束覆盖模式间的灵活切换:左旋圆偏振光对应点阵扫描模式,级联超表面间±100 μm微小相对面内平移可实现±35°二维视场的高准直点阵光束扫描,改变位移步长可动态调整分辨率,适用于高精度、远距离的三维扫描任务;右旋圆偏振光对应闪光模式,通过一次性照亮整个视场,可实现瞬时三维成像。
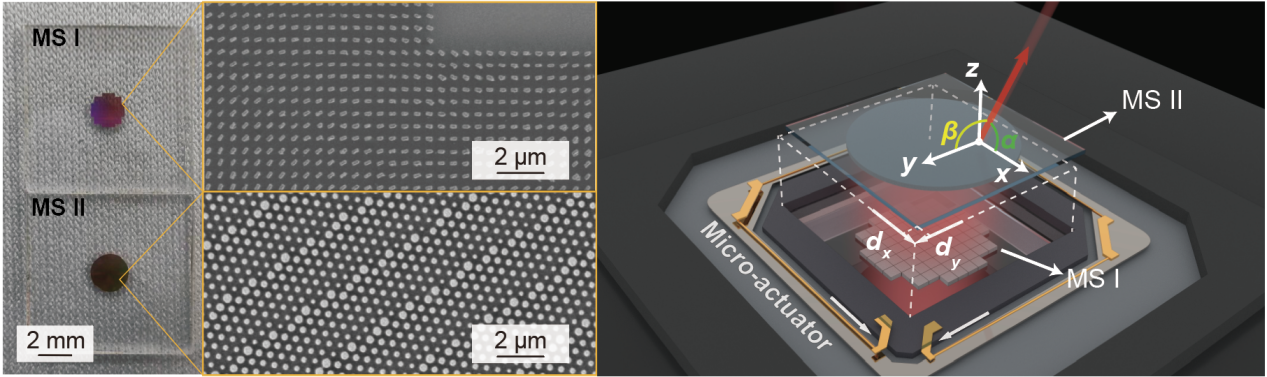
图2.基于集成级联超表面-致动器平台的光束调控器件
混合级联超表面作为器件的核心,第一层为偏振敏感的几何相位超表面并采用阵列化设计,第二层为非偏振敏感的传输相位超表面。级联超表面针对1064 nm波长设计,分别采用标准微纳加工工艺制备,包括等离子增强化学气相沉积(PECVD)、电子束曝光(EBL)与感应耦合等离子体刻蚀(ICP)等步骤加工。光束调控器件集成形状记忆合金微致动器实现两层超表面之间的高精度面内位移驱动,具备微型化、响应快和易集成等优势。
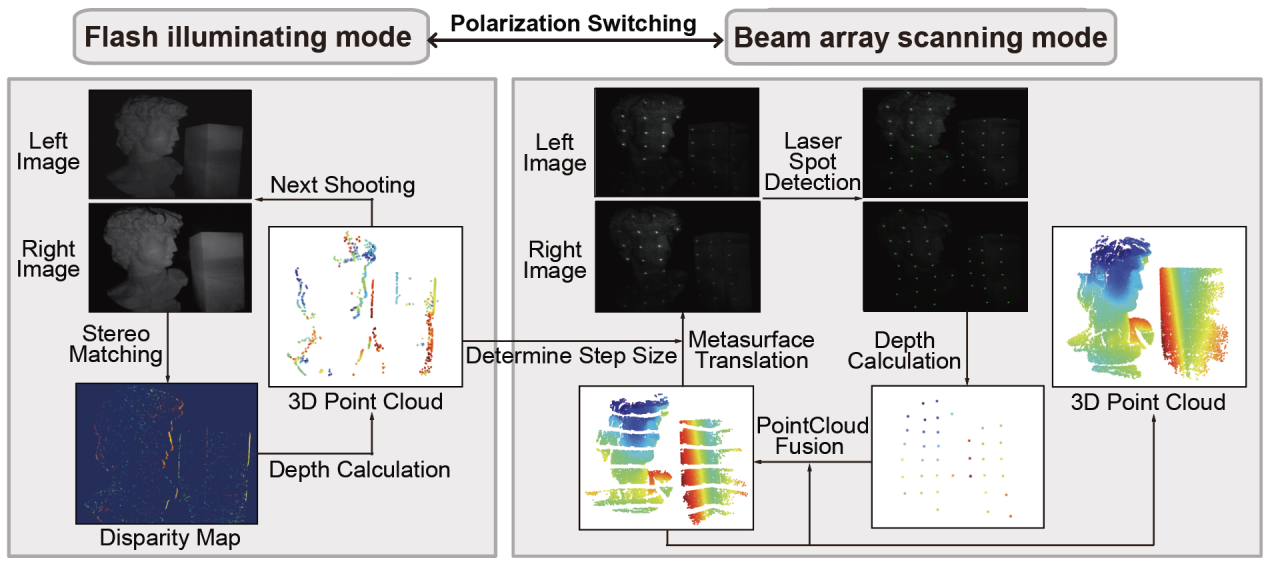
图3.基于双模式激光雷达系统的三维探测流程示意图
此外,研究团队基于光束调控器件构建了一套双模式激光雷达系统与自适应三维重建方案。系统首先工作在闪光模式下,快速完成整场景的快照式三维探测,获取目标边界形貌与复杂度信息。该初步数据为后续扫描模式中的步进策略提供依据,使系统能够根据实际目标特征智能选择扫描分辨率。在波束扫描阶段,系统可灵活执行粗略或精细的定向扫描任务,兼顾整体效率与局部细节。该系统通过偏振态驱动实现两种模式间的灵活切换,在保证全局快速探测的同时精确捕捉目标关键特征,突破了传统单一激光雷达在效率与精度之间互相矛盾的性能瓶颈。
基于混合级联超表面多通道、高自由度光束整形能力,双模式激光雷达系统在融合扫描式激光雷达高精度与flash激光雷达高效率优势时,显著提升了在复杂环境与多样探测任务下的适应性与灵活性。此外,借助超表面器件的超薄、超轻与可集成优势,研究团队研发出一套轻量化、精度可调的光束调控平台,可与飞行时间法、双目视觉等多种三维成像机制兼容,具备良好的系统集成与功能扩展能力。研究团队表示,该工作不仅构建了可适配多任务需求的高性能三维感知平台,也为推动激光雷达系统的小型化、智能化与多模式探测发展提供了新思路。
相关研究成果以“通过机械可调混合级联超表面实现的双模激光雷达系统”(A dual-mode LiDAR system enabled by mechanically tunable hybrid cascaded metasurfaces)为题,于8月25日发表于《光:科学和应用》(Light: Science & Applications)。
该研究由清华大学精密仪器系、精密测试技术与仪器国家重点实验室、北京市集成电路高精尖创新中心、北京信息科技大学智能微系统实验室,以及华中科技大学智能制造装备与技术国家重点实验室共同完成。清华大学精密仪器系2019级博士生张凌云和2022级博士生张驰为论文共同第一作者。清华大学精密仪器系教授邢飞、副教授赵晓光与北京信息科技大学教授景晓丽为论文共同通讯作者。研究得到国家自然科学基金、国家重点研发计划等的资助。
论文链接:
https://doi.org/10.1038/s41377-025-01999-4
供稿:精仪系
编辑:李华山
审核:郭玲
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章




暂无评论...