无人机遥感光谱智能感知研究获进展






无人机遥感技术的成熟显著提高了现实场景三维光场建模效率。通过机载多光谱或高光谱相机获取特定区域的多角度信息,可实现高精度光场建模,进而推动地表参数反演方案和理论发展。相比传统手段,无人机对地多角度观测具有覆盖区域广、灵活便捷、成像时间迅速及在复杂区域高效获取数据等优势。但是,现有技术在无人机飞行方案规划、多角度影像获取及模型适应性改进等方面存在局限,制约了其在大区域高分辨率、高精度应用。
针对上述问题,中国科学院西安光学精密机械研究所副研究员李海巍团队联合研究员王爽,首创无人机多矩形嵌套飞行方案,并基于多角度影像计算了研究区域单像素类别、坡度、坡向等属性,构建了多角度信息库。研究人员利用该信息库,对Hapke、Kernel、RPV模型进行适应性改进,将建模尺度精确到单个厘米级像素。进一步,研究提出自适应扩散理论,并结合自适应感知扩散窗口,将单个像素建模结果扩散到最大最优观测区域,实现高精度建模。基于此,高精度模型的地物分类精度从91.65%提升至97.23%。
这一研究为无人机遥感技术发展与应用开辟了新路径,有望为低空经济的高质量需求提供新的技术手段。
近日,相关研究成果发表在ISPRS Journal of Photogrammetry and Remote Sensing上。研究工作得到国家自然科学基金委员会、科学技术部等的支持。
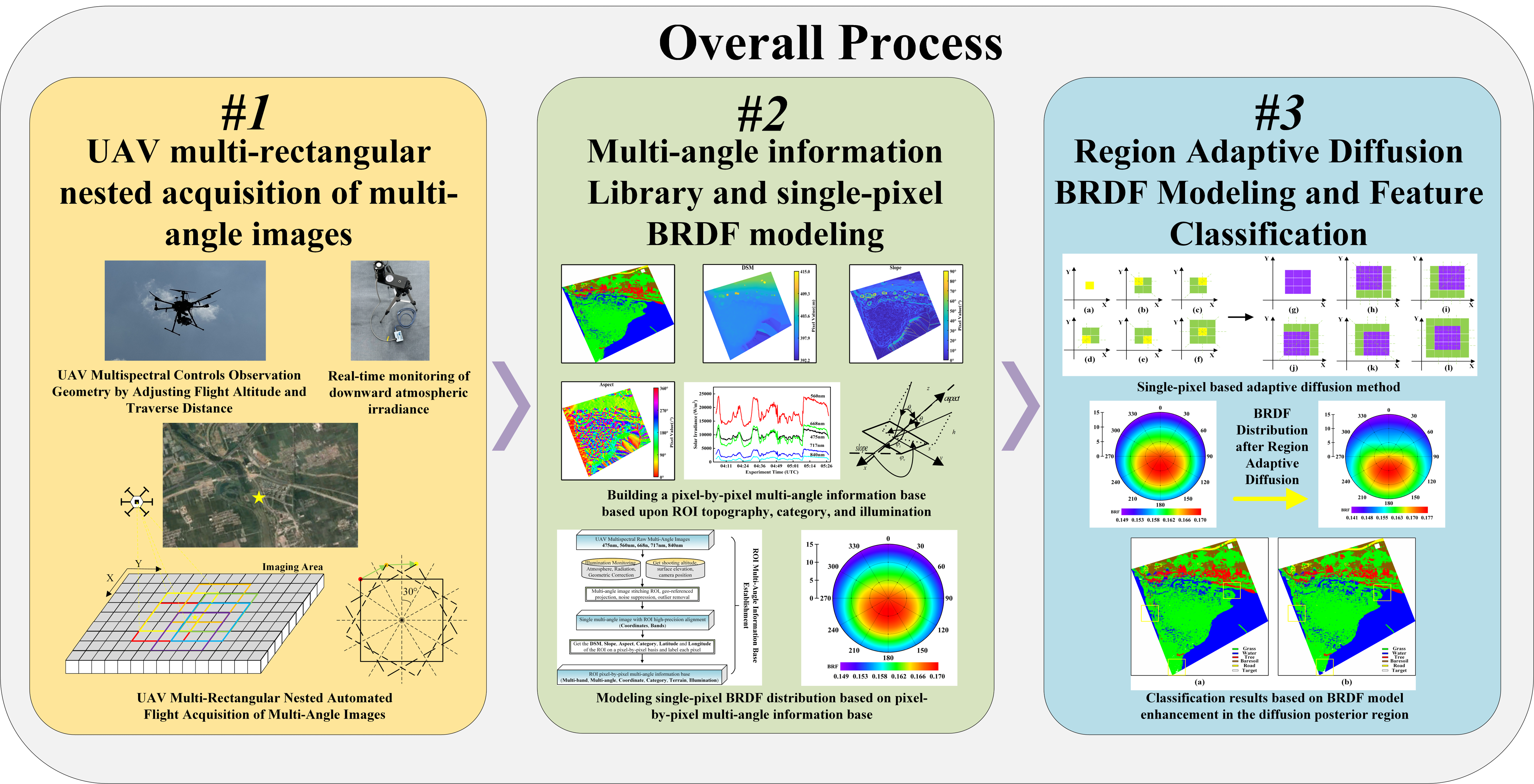
区域空谱自适应泛化驱动的无人机载遥感大区域高精度BRDF建模流程
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。






相关文章



暂无评论...