







文章导读
全球量子计算竞赛都在比拼量子比特数,但你有没有想过,也许方向本身就错了?传统双态量子比特(qubit)看似主流,却需要多次分解操作才能实现复杂运算,这不仅拖慢速度,还让错误不断累积。南京大学团队的最新突破,直接绕开了这个死胡同——他们用三进制qutrit替代qubit,单步就能实现原本需要5个物理门的操作,编译效率跃升68.2%。更可怕的是,实测门保真度稳定在99.5%,连续运行18小时不漂移。这或许意味着,未来的量子处理器不再靠堆数量取胜,而在于单颗芯片的算力深度。
— 内容由好学术AI分析文章内容生成,仅供参考。
近日,南京大学物理学院、狮山量子计算与量子探测前沿实验室于扬教授团队在高维超导量子计算领域取得重要进展。研究团队理论提出并实验验证了一种基于相干控制单步实现三进制量子门(single-qutrit gate)的新方案,成功攻克了原生qutrit量子门集高效实现的物理瓶颈。该工作不仅突破了量子平台固有的选择定则限制,更显著提升量子门的操作速度与量子线路的编译效率,为在各种量子硬件上构建高性能的三进制量子处理器开辟了切实可行的路径。
传统量子计算机主要依赖双态量子比特(qubit)处理信息。相比之下,拥有三个能级的qutrit能够提供更广阔的计算空间。这种高维特性使得单个量子系统能承载更多信息量,能显著节省硬件资源并缩短量子线路深度。然而,在高维量子系统的实际操控中,物理平台受限于选择定则,实现高保真度且快速的qutrit量<>子门(即SU(3) 操作)面临严峻挑战。常规方案通常需要将 SU(3) 操作分解为一系列低维度的 SU(2)子操作,这不仅操作序列冗长、执行缓慢,还会导致错误在多步门序列中不断累积,最终削弱三进制量子计算的潜在优势。此外,现有的最优控制技术原则上虽然可行,但往往会消耗大量计算资源,且需要针对特定硬件进行繁琐的校准,难以在大规模量子处理器中推广。
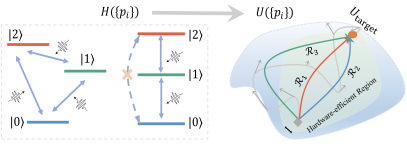
图1. 单步实现qutrit 门的相干操控方案
针对这一问题,研究团队创新性地开发了一种通过双频相干驱动直接操控SU(3) 动力学演化的方案。如图1所示,该方案通过解析求解选择定则约束下的动力学演化轨迹,实现了qutrit量子门的单步构建,从根本上解决 SU(2) 分解带来的冗长序列,同时也避免了最优控制技术中复杂的迭代搜索难题。在量子编译方面,该方案展现了卓越的效率优势。比如对于三维Clifford 门集构建,该方法将原生物理门的平均需求量从 5.25个 降低至 1.667个,使编译效率跃升了 68.2%。此外,研究团队进一步提出通用 SU(3) 分解策略,合成任意 SU(3) 操作所需的物理门代价较传统方案减少了三分之一。
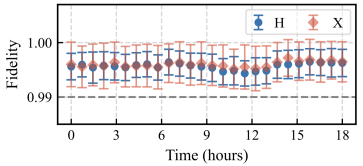
图2. qutrit 门保真度的长期稳定性
作为原理性验证,研究团队采用超导transmon器件的三个能级构建qutrit,分别实现了35ns的qutrit Hadamard(H)与 X 门。随机基准测试表征,两类门的平均保真度均达到了99.5%,接近退相干极限且在连续 18 小时的重复测量中保持稳定,证明了该方案在当前设备上具有极高的长期可靠性(图2)。与此同时,团队还演示了 qutrit Ramsey 干涉实验和奇偶校验算法,展示了该方案的应用潜力(图3)。
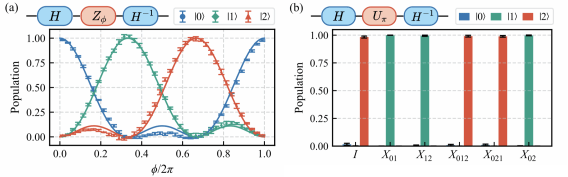
图3.基于qutrit 的量子算法演示
该成果以“EfficientImplementation of a Single-Qutrit Gate Set via Coherent Control”为题,于2026年6月12日在线发表于《物理学评论快报》[Physical Review Letters 136, 230803 (2026)]。 南京大学物理学院博士研究生喻祥敏、邓翔、辛蔚为该论文的共同第一作者,南京大学郑文博士后、李绍雄研究员与于扬教授为共同通讯作者。该研究工作依托南京大学物理学院、固体微结构物理全国重点实验室、狮山量子计算与量子探测前沿实验室、江苏省量子信息科学与技术重点实验室、合肥国家实验室等平台,并得到量子科学与技术国家科技重大专项、国家自然科学基金、江苏省自然科学基金、山东省自然科学基金等项目的资助。
论文链接:https://doi.org/10.1103/vwzp-szjp
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章





太高深了,就看个热闹😂