东南大学王炳昊团队在《自然通讯》发表机器人三维力触觉成果







文章导读
当机器人触觉传感器还在为内部密密麻麻的连线导致的串扰和易损坏而头疼时,东南大学团队在《自然通讯》上给出一个反直觉的答案:只用16个外围电极,就能实现三维力感知。这个超柔性“电子皮肤”能缠绕在0.3mm的针头上,即使被扎破也能正常工作。更颠覆的是,它通过分析光斑的偏移来区分法向力和剪切力,让机器人“读懂”触摸的几何形状。但真正让传统方案坐不住的,是那个高达80的像素-互连比——这意味着什么?如果你还在为机器人触觉的精度和柔性纠结,这篇文章可能会让你重新思考整个设计路径。
— 内容由好学术AI分析文章内容生成,仅供参考。
(通讯员 赵德淳)近日,东南大学电子科学与工程学院王炳昊教授团队在《自然通讯》发表机器人三维力触觉成果。相关研究成果以“Ultraflexible photoelectrical impedance tomography-based imager for 3-axis robotic tactile sensing(用于机器人三维力触觉感知的超柔性光电拓扑图像传感器)”为题,2026年3月发表于《Nature Communications》。
触觉成像技术旨在赋予机器人系统感知接触界面压力分布与纹理特征的能力,是实现精细操作与物体识别的基础。传统触觉传感器多采用交叉阵列结构,其分辨率与互连线数量呈正相关,带来串扰、单点失效与制造成本上升等系统性问题。与此同时,现有三轴力感知方案——包括电容式、压阻式、磁感应式及基于CMOS图像传感器的光学方案——普遍存在结构复杂、柔性不足或无法有效解耦法向力与剪切力的局限,限制了其在复杂曲面上的集成应用与人形机器人等场景中的部署。
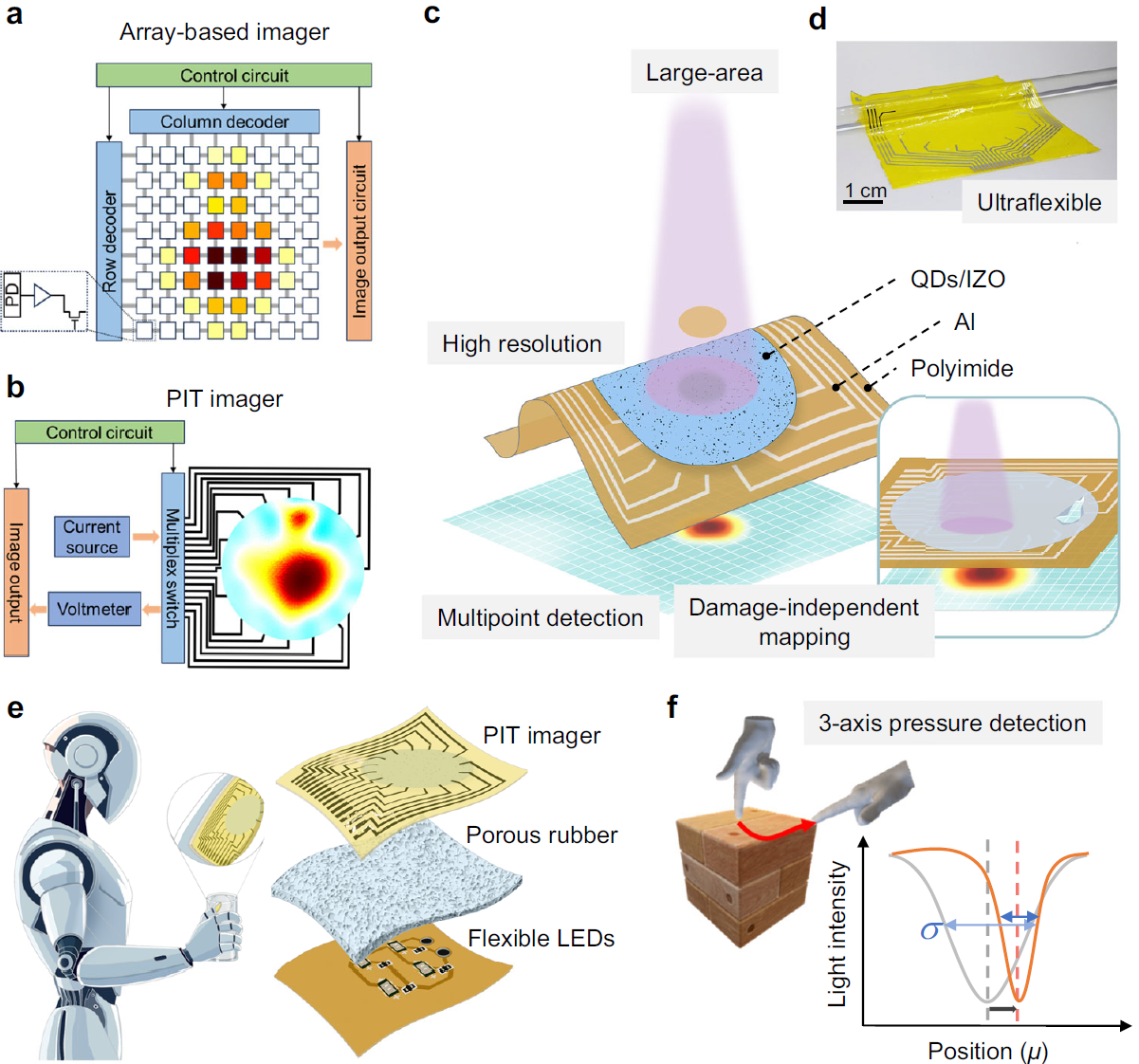
本研究提出了一种基于光电阻抗层析成像(PIT)的超柔性图像传感器。与传统阵列式设计不同,该器件仅在感测区域外围布置16个电极,内部无任何互连线。其成像原理采用电阻抗层析成像(EIT)框架:通过循环向相邻电极对注入电流,并测量其余电极对上的电压响应,利用EIDORS软件结合有限元模型重构出感测区域内的阻抗分布,进而反推光场分布。该架构实现了超过80的像素-互连比,并具备损伤容限特性——即使感测区域发生局部穿刺,外围电极仍可维持正常功能。在机械柔性方面,该传感器可紧密缠绕于半径仅0.3 mm的针头,电压波动控制在4.8%以内,展现出优异的共形能力。在成像性能上,PIT成像器可同时追踪最多五个紫外光斑,空间分辨率达1.5 mm。
为实现三维力感知,PIT传感器与光散射多孔橡胶层及柔性UV LED光源集成,构成完整的触觉单元。多孔橡胶通过糖颗粒模板法制备,平均孔径约100 μm,具有良好的力学回弹与光散射特性。在无压力状态下,橡胶层对LED入射光产生均匀散射;施加法向力时,内部孔隙压缩,散射减弱,光斑强度增强且区域集中;施加剪切力时,光斑出现与力方向一致的偏移。为验证系统在触觉识别任务中的有效性,研究团队将PIT重构图像输入ResNet-18卷积神经网络进行分类训练。训练数据涵盖球面、立方体面、棱边与顶点四种几何接触模式,经过训练后,网络在测试集上的平均分类准确率达到96.5%。
论文的概念提出者和通讯作者、东南大学王炳昊教授说:“这项研究就像给机器手穿上一件超薄、智能、不怕损坏的“电子皮肤”。它用巧妙的边缘电极设计替代了密密麻麻的内部电线,用光斑分析代替了复杂的传感器阵列,让人工智能帮助机器人“读懂”触摸的感觉”。
该研究工作得到了国家重点研发计划、国家自然科学基金、江苏省自然科学基金以及江苏省研究生科研与实践创新计划等项目的资助与支持。
论文链接:https://doi.org/10.1038/s41467-026-70599-6
供稿:电子科学与工程学院
(责任编辑:嵇宏 审核:宋业春)
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



三维力感知这个,机器人捏鸡蛋终于不会捏碎了?
16个电极就能成像,那之前搞阵列的是不是都走弯路了
这电子皮肤听着挺科幻的,真能不怕扎?