科研人员研制出双螺旋纤维增强的自感知人工肌肉







文章导读
你正盯着实验室里那些笨重的机器人,想着如何让它们更灵活、更智能,却没想到真正的突破藏在一根“肌肉”里。大多数柔性驱动器只能靠外部传感器反馈动作,而这次中国科大研发的自感知人工肌肉,直接把感知功能“长”进了纤维内部——双螺旋结构既是驱动体,又是传感器,精度达0.01mm,耐久超2万次循环。更关键的是,它能让机器人在黑暗中感知深坑、在翻滚后自主恢复姿态,甚至识别外界刺激。但我们测试后发现,最颠覆的不是它的力量,而是它如何用最简单的物理结构,绕开了长期困扰行业的“感知延迟”难题。
— 内容由好学术AI分析文章内容生成,仅供参考。
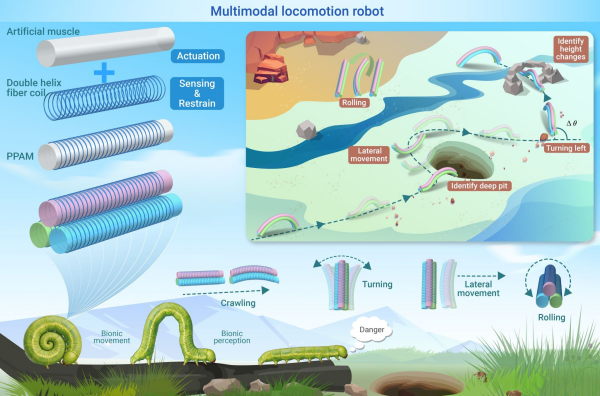
近日,中国科学技术大学研制出双螺旋纤维增强的自感知人工肌肉,并基于三组人工肌肉的模块化组合,构建出多模态仿生移动机器人,能够实现四种运动模式,具备多地形自适应移动与外界刺激感知决策能力。该研究为高度智能化探索作业机器人的发展提供了新的技术路径,也为基于人工肌肉构建感知型柔性操作器提供了新的设计思路。
这款自感知人工肌肉采用不可拉伸的双螺旋导电纤维,能够限制人工肌肉的径向膨胀,内部腔室充气加压时,人工肌肉产生轴向伸长。双螺旋纤维同时构成类似弹簧的螺旋感应线圈,其电感值随人工肌肉长度变化而单调变化。通过实时测量线圈电感,可实现对人工肌肉长度的高精度自感知。此外,团队建立了相应的静力学分析模型与感知等效电路模型,并结合有限元仿真对结构参数和驱动性能进行优化。该自感知人工肌肉感知分辨率0.01mm、迟滞误差仅1.05%、循环耐久性超过20000次,具有良好的模块化可扩展性,并能够根据任务需求灵活组合。
同时,团队将三组自感知人工肌肉捆绑组合,构建了由多腔室气压协调控制的柔性移动机器人。通过设计不同的充放气时序,机器人可以实现四种基本运动模式。模拟分节爬行动物的蠕动步态,适用于有一定摩擦力的平坦或起伏地面(爬行模式);横向滑行适用于草地、泥地、平板桥及浅水区域(平动模式);整体翻转可快速穿越沙地和鹅卵石等松软地形(翻滚模式);通过差动控制实现原地或行进中的方向调整(转向模式)。
团队进一步利用机器人感知—驱动一体化设计优势,使机器人能够基于自身感知信息进行环境感知与运动决策。机器人能够在有光和黑暗环境下感知前方深坑,主动调整路径绕行通过(障碍绕行);通过实时感知身体压缩量,自动调节运动幅度穿越低矮隧道(窄道穿越);能够实时感知自身姿态,在移动中发生侧翻时自动调整恢复稳定运动(姿态自恢复);借助机器学习方法,可对不同类型的外界交互刺激进行识别与分类(外界刺激识别)。
相关研究成果发表在《创新》(The Innovation)上。研究工作得到国家自然科学基金和中国科学院相关项目等的支持。
自感知人工肌肉驱动的多模态仿生移动机器人
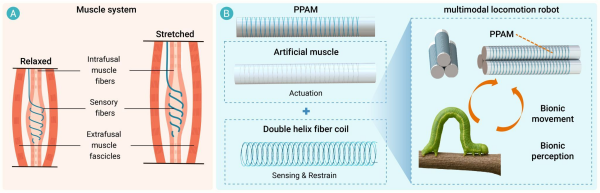
仿生肌梭结构启发的自感知人工肌肉:结构示意与感知原理
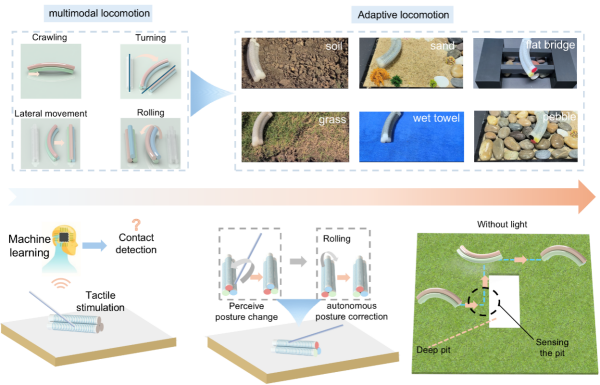
多模态运动与智能感知行为实验验证
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



蹲了个机器人翻车现场,结果它自己爬起来了hhh
那个啥,电感测长度会不会受干扰啊?
感觉比上一代强不少,至少会躲坑了
我好奇黑暗环境下靠啥感知?红外吗?
机器人翻跟头的样子脑补出来有点搞笑😂
说的有道理
要是能下泥地测试就更信服了
之前搞过柔性驱动器,这个感知精度有点离谱👍
太贵了吧这也,实验室玩具吧
这玩意能用在假肢上不?