电子科技大学生命学院刘贻尧教授课题组在Advanced Science期刊发表最新研究论文







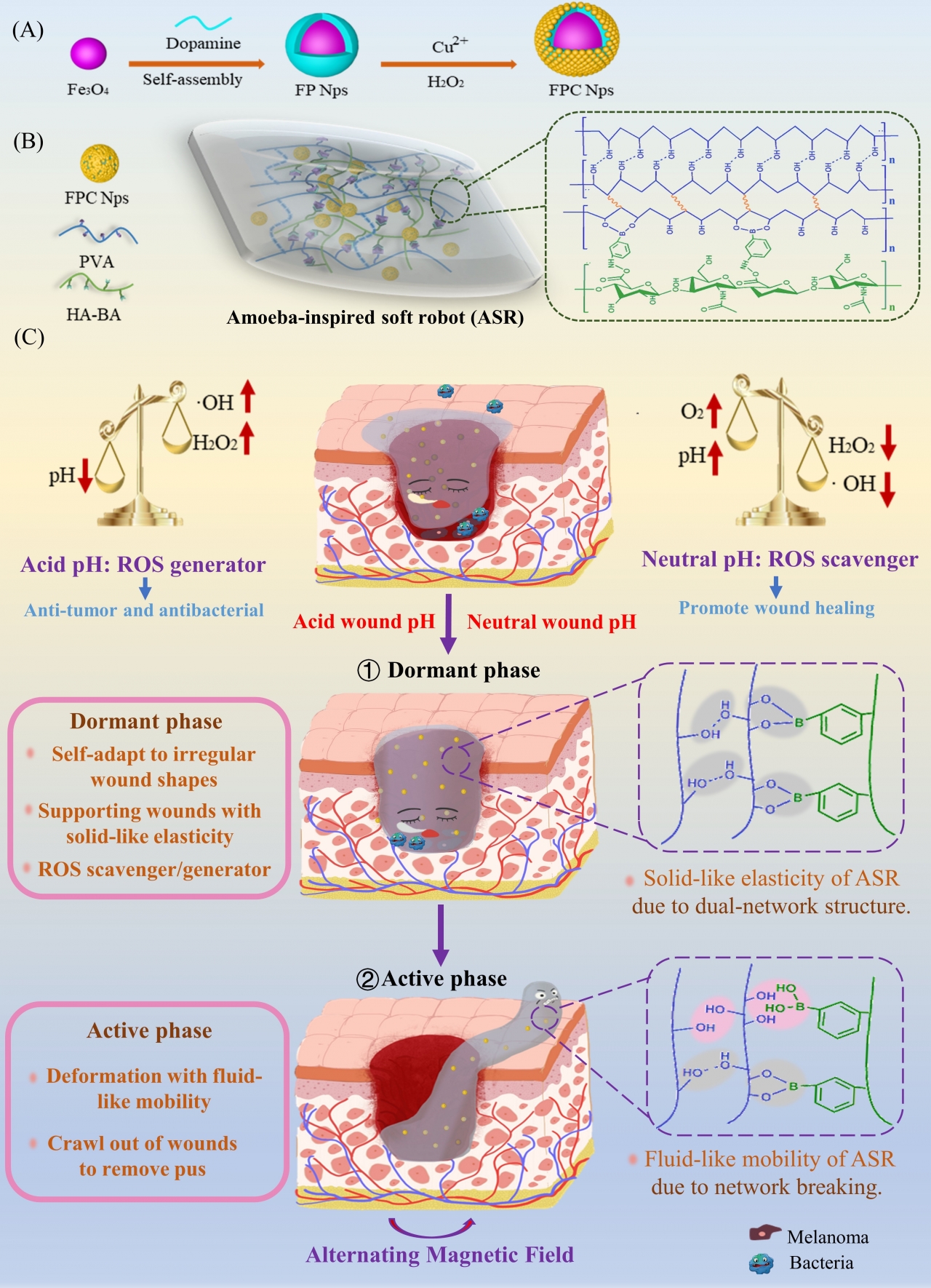
近日,生命科学与技术学院刘贻尧教授团队在学术期刊Advanced Science在线发表了最新研究进展《Amoeba-Inspired Soft Robot for Integrated Tumor/Infection Therapy and Painless Postoperative Drainage》(变形虫仿生软机器人用于肿瘤切除术后综合治疗和无痛伤口引流)。针对黑色素瘤局部阔切手术后肿瘤复发,伤口感染,以及术后伤口引流加剧患者疼痛等严重并发症,这项研究创新性提出了黏附可调的软机器人伤口敷料的概念。该仿生磁性软机器人能双向调节伤口的活性氧水平,平衡在伤口愈合过程中需要清除活性氧与在肿瘤/感染控制过程中需要增加创面活性氧之间的矛盾需求,并且实现窦道型伤口的无痛引流,为未来智能化伤口管理提供了新的方向。电子科技大学为第一完成单位,刘贻尧教授、杨红教授和电子科技大学附属四川省人民医院骨科张伟教授为该论文的共同通讯作者,生命科学与技术学院博士生周宛仪为论文的第一作者。

受到单细胞生物变形虫的启发,研究团队设计了具有可切换休眠期和活跃期的仿生磁性软机器人。在休眠状态下,仿生软体机器人具有更强的黏附力和机械性能保护伤口,同时调节伤口的活性氧水平,综合肿瘤与感染治疗管理;而在活跃状态下,机器人黏附力显著降低,通过模拟变形虫的运动,从不规则伤口爬出,清理伤口深处的脓液。此外,机器人的爬行过程对伤口组织实施“非直接摩擦”,减轻了患者的痛苦,并防止引流过程对伤口造成二次损伤。此外,该仿生机器人具有适当的内聚力,降低了驱动其所需的磁性,因此其磁性纳米颗粒的含量比传统磁性软机器人低一个数量级,实现了在体内良好的生物相容性。变形虫仿生机器人通过无痛引流伤口渗出物、抑制肿瘤复发、防止感染等优势全面促进肿瘤切除手术后伤口愈合,有望推动未来临床智能敷料发展。基于该研究,已经申请了国家发明专利2项。
本研究得到了国家自然科学基金项目(52372263,12132004,32171395)和四川省自然科学基金(2022NSFSC0048)等项目的支持。
论文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/advs.202407148
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...