资源所科研团队在森林结构精细化监测中取得新进展







文章导读
手持激光雷达价格已跌破万元大关,但设备精度不足导致的树干测量误差却始终困扰着林业调查。当传统算法在噪声点云中迷失方向时,中科院团队如何用卡尔曼滤波技术实现突破?最新研究通过将点云转化为角度域序列,使树干截面重建精度提升至87%,胸径测量误差控制在2厘米以内。这项获国家发明专利的技术已在多款设备验证成功,正推动森林调查从粗放走向精准——未来带着手机大小的设备走进森林,就能获得堪比地基激光雷达的监测效果。
— 内容由好学术AI分析文章内容生成,仅供参考。
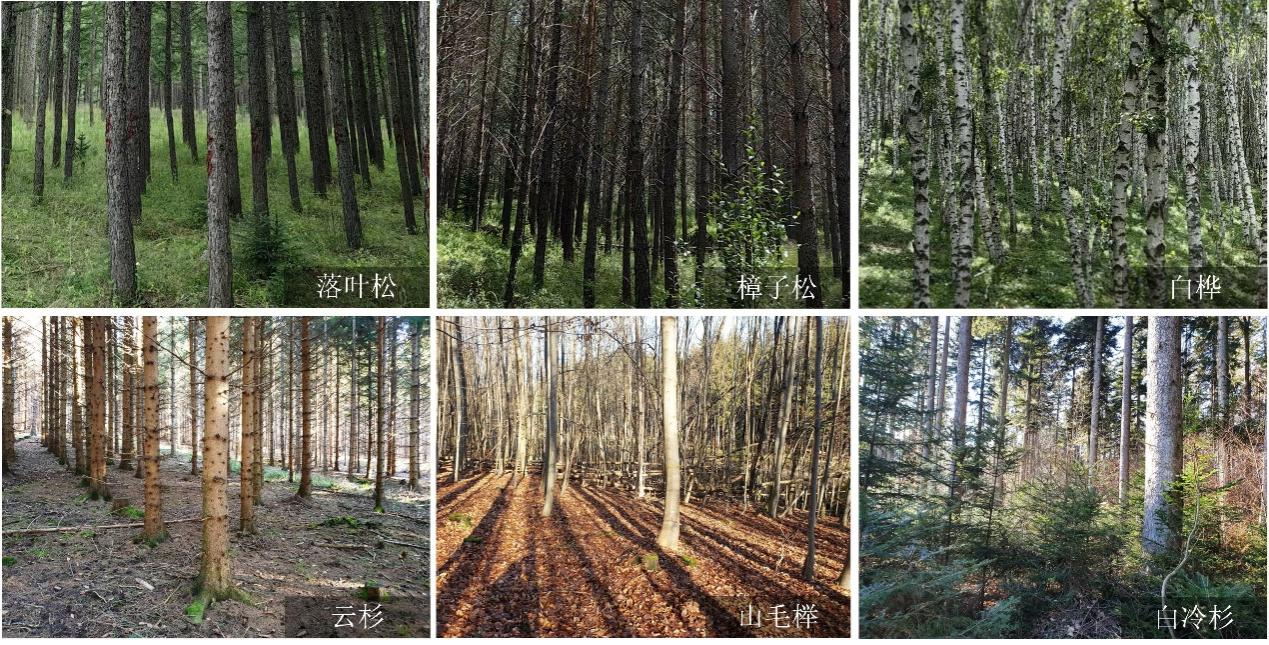
图1:研究区多树种概况
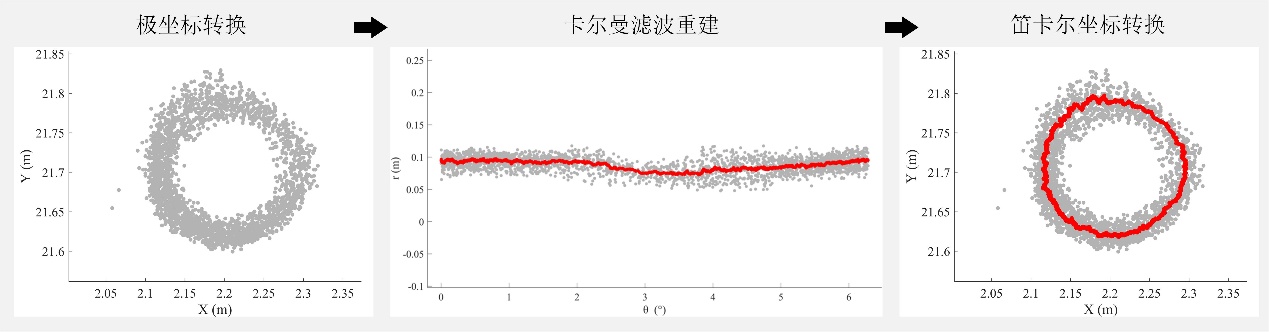
图2:算法流程图(手持激光雷达点云与重建截面分别以灰、红呈现)
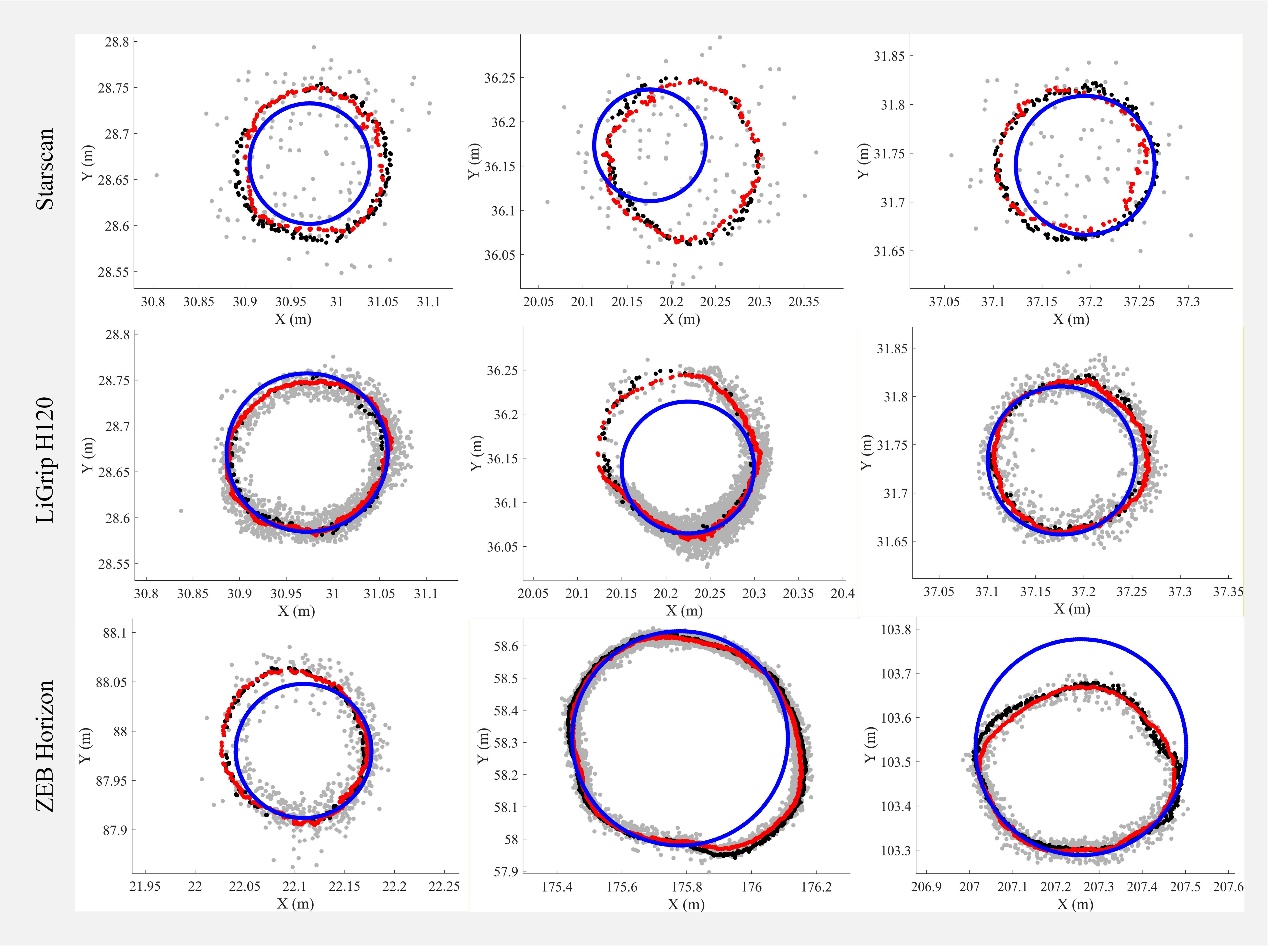
图 3:树干截面重建对比:所提算法与RANSAC算法,地基激光雷达点云为参考
(地基、手持激光雷达点云、所提算法与RANSAC重建截面分别以黑、灰、红、蓝表示)
资源所激光雷达遥感团队针对手持激光雷达在森林结构精细化监测中面临的关键技术瓶颈——设备精度限制导致树干表面易产生一定厚度的点云噪声,进而影响树干截面表征与胸径测量精度的问题,提出了一种基于卡尔曼滤波的树干横截面重建与胸径测量算法。
该算法利用树干表面径向距离随角度平滑变化的特性,以树干中心为极坐标原点,将截面点云转换至角度域,使径向距离在角度维度上形成类似序列化的表达;通过在局部角度增量上进行估计,并利用卡尔曼滤波对噪声观测进行递推更新,成功实现对点云分布不均与测量噪声的自适应处理,高精度还原树干真实截面轮廓。
基于不同精度手持激光雷达数据的验证结果显示,该算法的重建截面与地基激光雷达参考截面的交并比达87%,胸径估计均方根误差优于2cm,且在国内外多款手持激光雷达设备上均表现出良好的效果,为森林资源调查、精细化林业管理提供了可靠的技术支撑。随着手持激光雷达价格逐步进入“万元级”阶段,成本壁垒显著减轻,支撑高质量点云的常态化获取,该技术有望革新森林样地调查方式。
该项研究成果近期发表于林学类中科院一区TOP期刊《Journal of Forestry Research》(影响因子4.6)。激光雷达遥感团队蔡尚书博士为第一作者,团队首席专家庞勇研究员为通讯作者。本项研究得到国家重点研发计划(2023YFE0105100-3)、国家自然科学基金(42301510)等项目的联合资助,核心技术已获得国家发明专利的授权(专利号:202411832920.X,专利名称:“一种树干胸高断面重建和胸径确定方法、设备、介质及产品”)。
论文信息:Cai, S., Pang, Y. Trunk cross-section reconstruction and DBH calculation from handheld laser scanning data using Kalman filter.J.For.Res.37,12(2026). https://doi.org/10.1007/s11676-025-01952-6
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章




专利都拿下了,看来离实际应用不远了
RANSAC对比图蓝色那块偏差挺明显,新算法确实稳
天天催更科研进展不如多发这种实用成果😊
卡尔曼滤波居然还能这么用,学到了!
成本降到万元级的话,基层林场也能用上了吧?
手持激光雷达终于能精准测树了?交并比87%有点强啊🤔
这技术真牛,以后林业调查省力多了!👍