东南大学殷国栋团队在车辆动力学领域取得重要进展







文章导读
传统车辆动力学理论正面临严峻挑战,难以应对智能汽车的复杂需求。东南大学殷国栋教授团队另辟蹊径,提出一种革命性的广义车辆系统动力学理论架构。该创新理论将底盘约束、车间作用乃至信息交互,统一抽象为广义作用力,打破了“刚体-轮胎-路面”的传统框架,为高性能智能底盘设计与协同控制提供了统一的理论支撑,或将重塑未来汽车的设计与控制逻辑。
— 内容由好学术AI分析文章内容生成,仅供参考。
(通讯员 祝小元)近日,东南大学机械工程学院殷国栋教授提出一种广义车辆系统动力学理论架构,将底盘约束、车间作用与信息交互统一抽象为广义车辆系统内部的广义作用力,建立了涵盖机械、电子与信息多物理场耦合作用的动力学体系,丰富了传统“建模-估计-控制”理论内涵,形成了可指导高性能车辆底盘设计与协同控制的统一理论框架。相关成果以“广义车辆系统动力学:理论框架与总体概述”为题在《机械工程学报》2025年第18期的封面文章发表。
车辆动力学理论是汽车设计和控制的基础。随着汽车电动化与智能化快速发展,分布式、模块化与多冗余的新型底盘结构打破了传统车辆运动功能边界,车载、路测与网联等智能信息的引入也使车辆系统逐渐向物理信息系统演变。现有以“刚体-轮胎-路面”三要素为核心的车辆动力学理论体系难以统一化表征多运动形态的底盘动力学,更无法阐述多源外部环境信息与车辆之间的力学交互本质,其理论内涵与辐射范围凸显出模型构建通用性弱和环境信息包容性差两大局限。
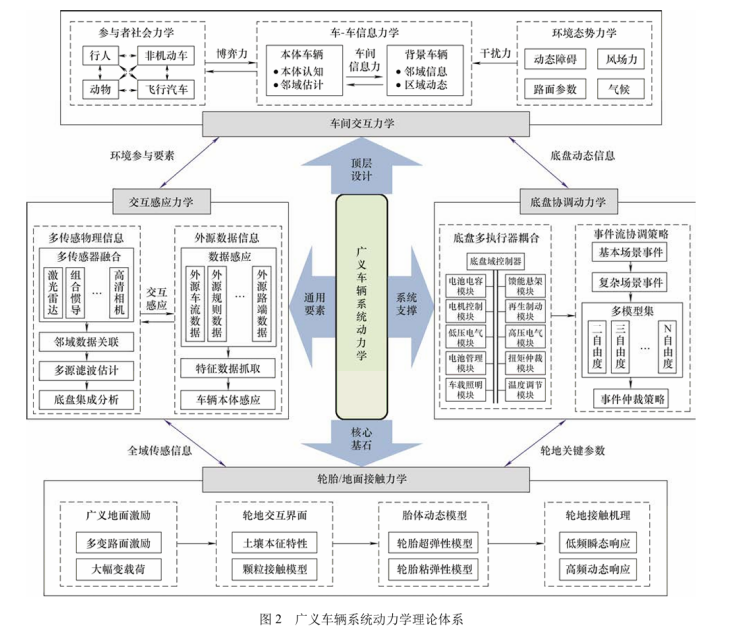
殷国栋教授针对上述问题,提出一种广义车辆系统动力学理论架构,打破了以“刚体-轮胎-路面”三要素为核心的传统车辆动力学框架,是描述车辆底盘构型、力学约束、外部环境等多物理场(机械、电子、信息等)相互作用的全新动力学架构。该工作突破了传统车辆动力学在单一构型、线性假设和机理建模等方面的局限,能够统一描述多形态底盘的动力学特性,为高性能智能底盘设计提供理论支撑。同时,将多源环境信息融入动力学建模体系,构建了面向高性能规控一体化的瞬态控制理论。该理论的提出为复杂环境下车辆的统一建模、运动边界拓展与新型底盘潜能释放提供了创新方案,并为智能网联汽车动力学理论与工程技术的融合发展奠定了重要基础。
该论文由东南大学殷国栋教授独立撰写,相关工作得到了国家自然科学基金杰出青年基金项目、国家自然科学基金重大项目的资助。
全文链接:http://www.cjmenet.com.cn/CN/10.3901/JME.2025.18.190
供稿:机械工程学院
(责任编辑:吴涵玉 审核:宋业春)
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。







相关文章




电动化+智能化双buff叠加,殷教授这框架来得正是时候!😊
广义作用力统一建模?有点东西,期待实际应用效果。
这理论听着就高大上,国产智能底盘有希望了!