东南大学自动化学院团队在控制领域关键技术研究中取得系列新进展







文章导读
当机器人编队遭遇速度限制,或海洋航行器面对复杂洋流时,传统控制方法往往束手无策。东南大学自动化学院两支团队在控制领域顶刊《IEEE TAC》连发重磅成果:李世华、王翔宇团队首创“分层协同控制”架构,让多机器人在严苛约束下仍能精准编队;温广辉团队则提出开环与闭环双优化策略,显著提升不确定环境下系统的鲁棒性与适应力。两项突破不仅理论扎实,更已通过机器人与航行器实测验证,为智能集群与高端装备的自主控制铺平道路。
— 内容由好学术AI分析文章内容生成,仅供参考。
(通讯员 薛浩 温广辉 王翔宇)近日,东南大学自动化学院李世华教授、王翔宇教授团队,以及温广辉教授团队分别在受限二阶多智能体系统分层协同控制、不确定系统优化控制领域取得重要突破,相关研究成果均以长文(Full Paper)形式发表于控制领域国际顶刊《IEEE Transactions on Automatic Control》(电气与电子工程师协会自动控制汇刊),为智能机器人、海洋航行器等领域的智能控制技术落地提供关键理论支撑。
多智能体协同控制是智能机器人编队、自动驾驶集群等技术的核心基础,而速度约束下的系统协同控制长期面临设计复杂度偏高、通用性和可扩展性偏弱等挑战。李世华教授、王翔宇教授团队的研究论文《Hierarchical Consensus of Constrained Second-Order Multi-Agent Systems With Application to Formation of Multiple Mobile Robots》(受限二阶多智能体系统的分层一致性及其在多移动机器人编队中的应用)针对这一问题,创新提出两层式约束协同控制方案:通过“约束分布式参考信号发生器”为各跟随者智能体精准生成符合速度约束的参考信号,结合“非线性映射跟踪控制器”实现各跟随者智能体对参考信号的渐近跟踪并避免过大控制量。该方案兼具高灵活性与强适配性,且已成功应用于多移动机器人编队任务,仿真与实验验证其可高效实现领导者-跟随者系统的渐近一致性和编队目标。论文将分层协同控制框架的适用范围扩展到受限多智能体系统的协同控制问题——这也是团队继2020年IEEE TAC长文、2024年《Automatica》长文后,在非线性协同控制与优化研究方向第三篇以长文形式发表在控制领域两大顶刊的核心成果,论文由王翔宇教授任第一作者,李世华教授任通信作者,东南大学为第一作者及通信作者单位。
受限多智能体系统分层协同控制方案
实验图像和各移动机器人在不同时刻的位置、轨迹
各移动机器人实际速度响应曲线(均满足各自约束条件)
群体具身智能的实时决策及控制,是航天器、海洋航行器等复杂载体高效应用的关键,而不确定Euler-Lagrange系统的聚合优化控制,长期面临鲁棒性不足、场景适配性单一的挑战。温广辉教授团队的研究论文《Distributed Aggregative Optimization of Uncertain Multiple Euler-Lagrange Systems: Comparative Analysis of Two Optimization-Control Strategies》(不确定多欧拉-拉格朗日系统的分布式聚合优化:两种优化控制策略的比较分析)针对这一问题,创新设计开环与闭环两类优化控制算法:通过“解耦式开环设计”优化控制模块、引入辅助简化系统,实现参数调节直观化,适配干扰小、工况明确的场景;结合“反馈式闭环框架”嵌入实时状态与误差反馈,构建强鲁棒性耦合结构,强化动态适应能力,可满足复杂洋流中海洋航行器、动态环境多机器人系统等复杂场景需求——方案兼具差异化适配性与工程实用性。两类算法已成功应用于海上航行器动态最优定位任务,仿真与鲁棒性对比分析验证其性能优于现有方案。论文由博士后房肖任第一作者,温广辉教授任通信作者,东南大学为第一作者及通信作者单位。
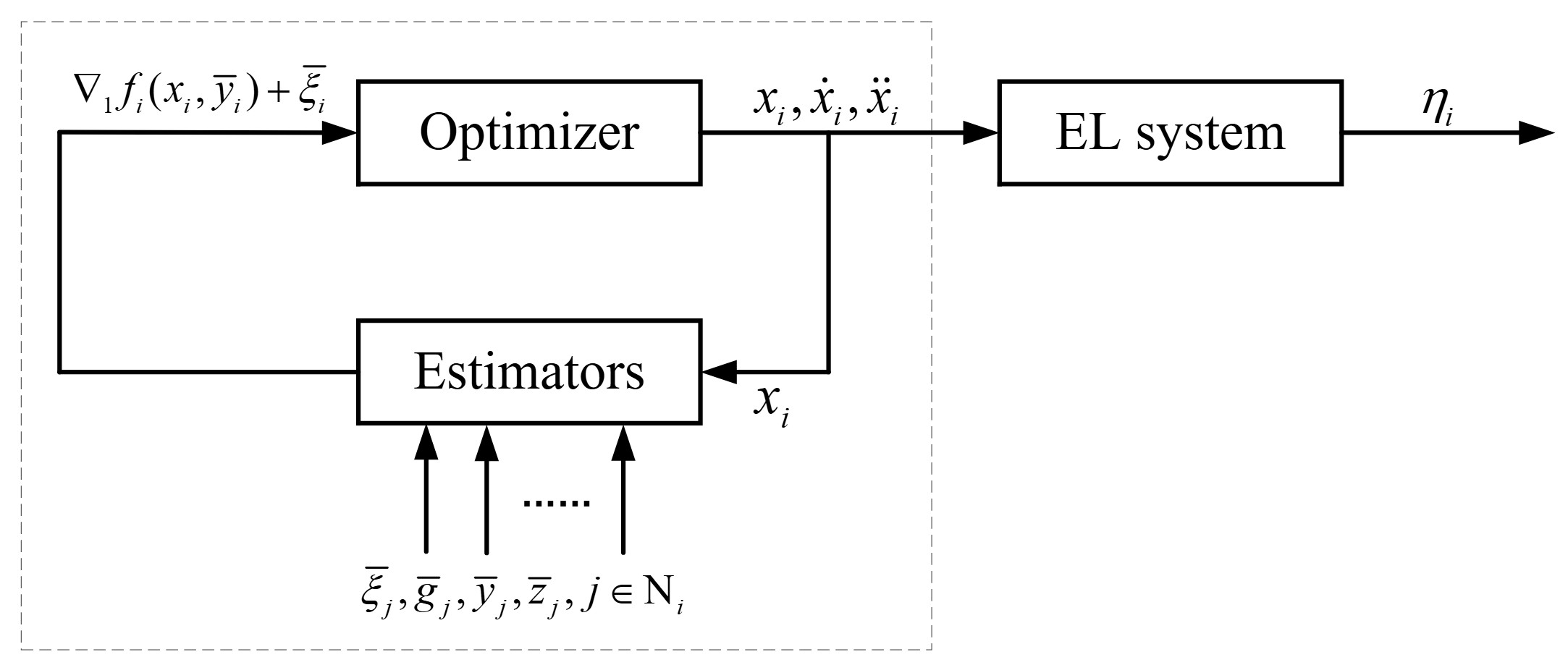
开环优化控制方法
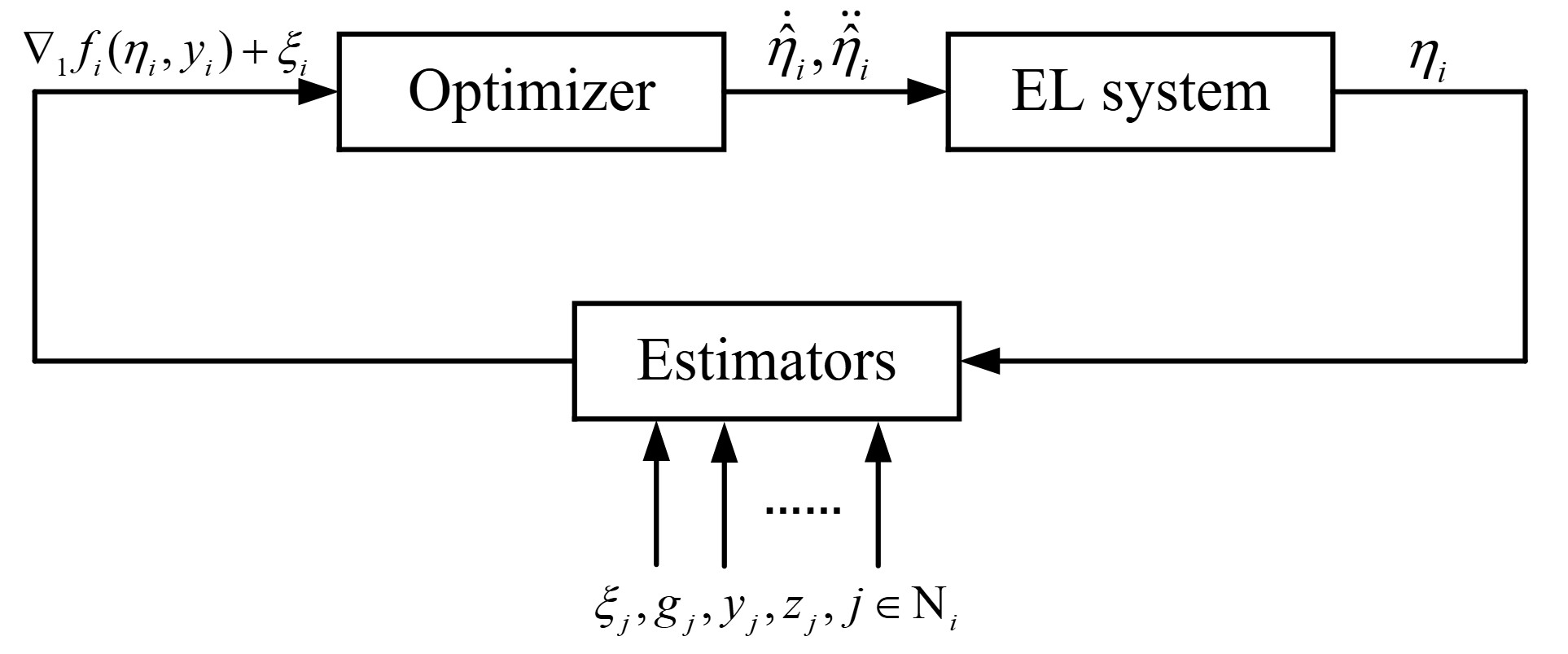
闭环优化控制方法
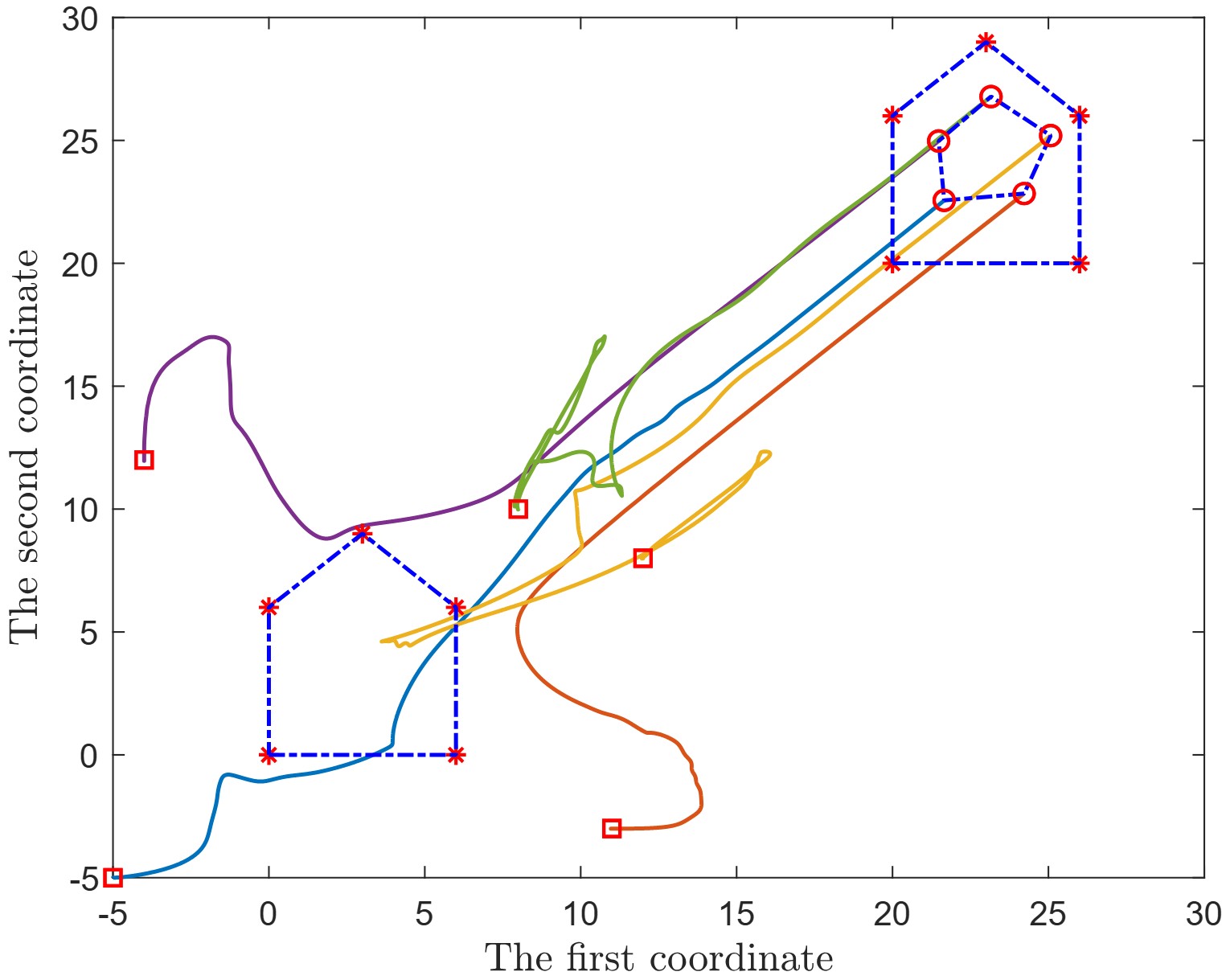
(a) 开环方法下航行器运行轨迹
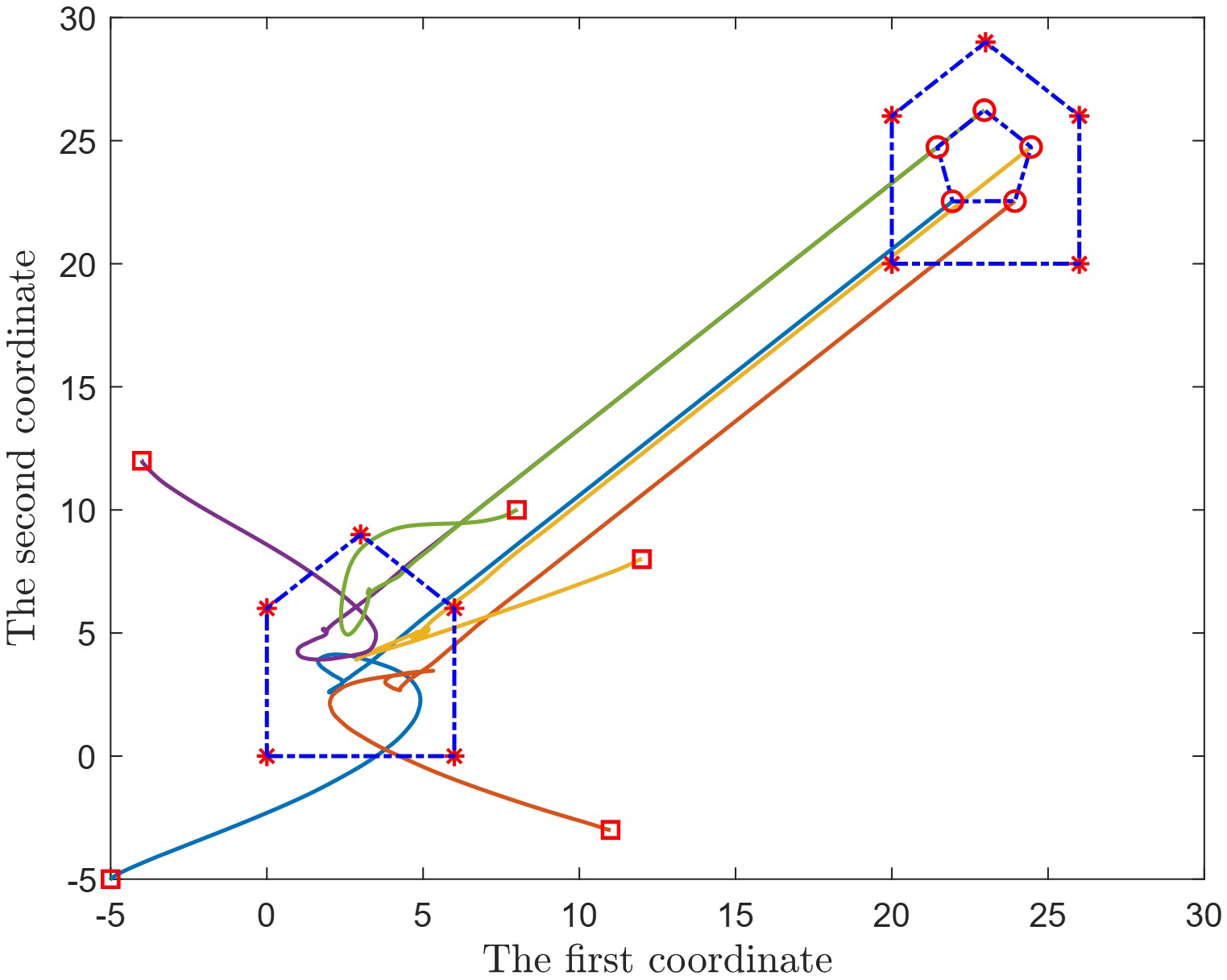
(b) 闭环方法下航行器运行轨迹
两项研究分别获得了国家自然科学基金、江苏省前沿技术研发计划等项目的资助。
论文链接(李世华教授、王翔宇教授团队):https://ieeexplore.ieee.org/document/11134797
论文链接(温广辉教授团队):https://ieeexplore.ieee.org/document/11192750
供稿:自动化学院
(责任编辑:周子琪 审核:宋业春)
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...