






文章导读
如何让微型机器人既能“动”又能“感”?华中科技大学臧剑锋、唐瀚川团队联合香港中文大学张立团队,突破毫米级机器人传感与驱动难以兼容的瓶颈,首创“机器人传感器”——将磁性驱动器与超声软传感器深度融合,实现无线环境感知与精准操控一体化。该技术可在活体模型中实时监测力、温度、黏度等参数,并完成闭环给药,为微创治疗与在体监测提供全新工程路径。成果登《科学·机器人学》。
— 内容由好学术AI分析文章内容生成,仅供参考。
9月17日,集成电路学院臧剑锋教授、唐瀚川副教授团队联合香港中文大学张立教授团队取得重要突破。团队研究提出一种微机器人传感器“Robotic Sensor”,解决在小尺度下无线驱动器和无线传感器不兼容的难题,有望为微机器人的生物医学应用提供新的解决方案。论文题为“用于无线机器人传感与操作的微型磁声驱动机器人(Miniature magneto‑ultrasonic machines for wireless robotic sensing and manipulation)”,发表于《科学·机器人学(Science Robotics)》期刊。
具备无线传感与操控能力的智能微型系统,被认为是推动生物医学应用的重要方向。但在毫米乃至更小尺度上,传感与驱动往往互相“打架”,使系统难以同时做到小型化、稳定和高性能。研究团队提出一种“机器人传感器”,将嵌入式超声软传感器(EUSS)与磁性执行器深度集成,突破小尺度传感——驱动不兼容瓶颈,构建无线传感与操控一体化的微型机器。EUSS与软/硬部件均兼容;依托机载换能器与无源超声通信,配合外部磁场,可对力、振动、黏度、温度等环境参量进行无线检测与调控,且不同物理场间干扰最低。在兔与猪模型中,系统完成基于频谱反馈的闭环操控,展示了精准剂量释放/给药与在位生理监测等关键能力。该研究为智能微型系统提供新的平台与工程路线,有望加速其在微创治疗与临床监测中的落地应用。
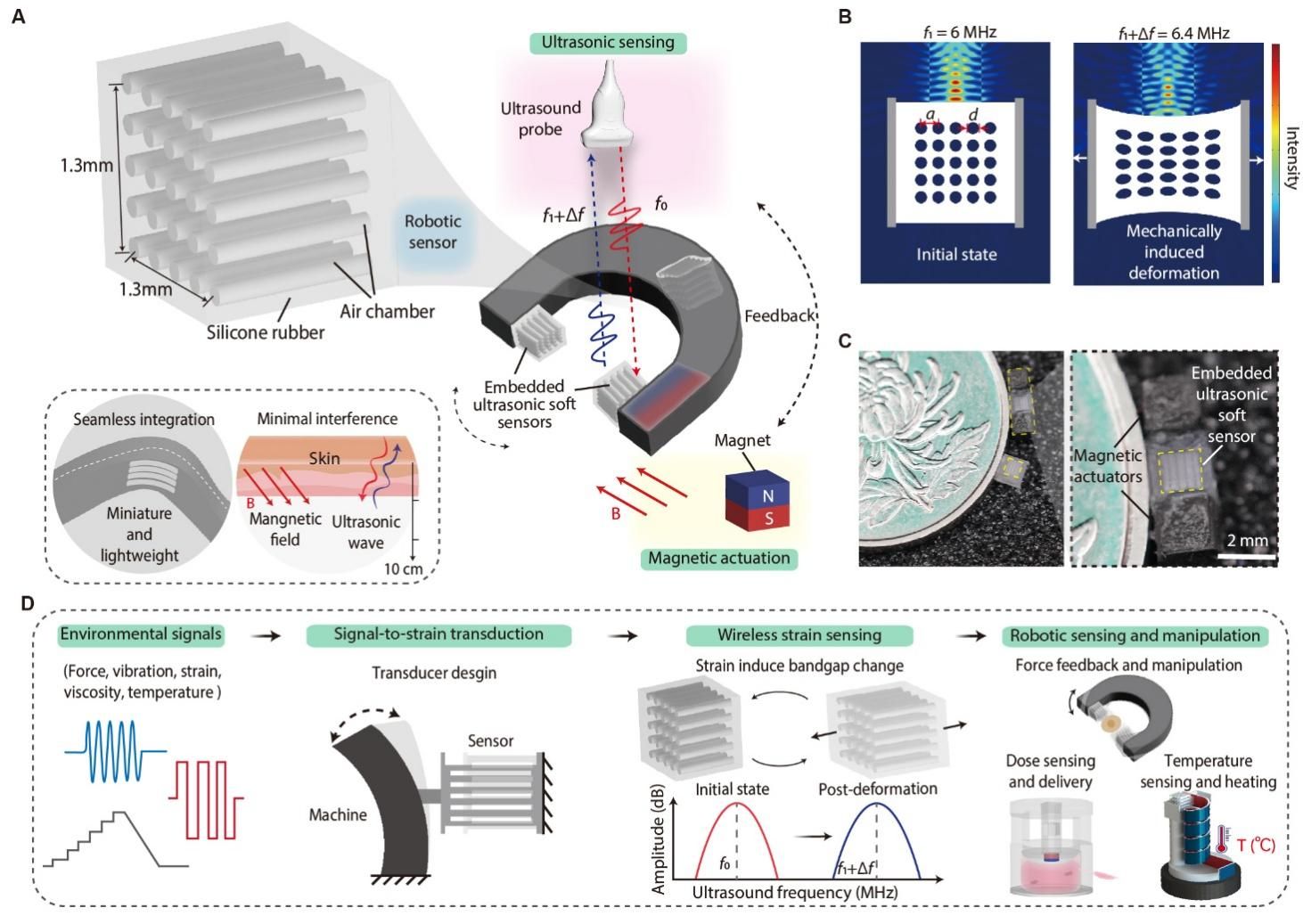
图为机器人传感器的设计与工作机理。
研究获得国家自然科学基金、中国科协青年人才托举工程、华中科技大学交叉研究支持计划、华中科技大学太湖未来技术创新基金、香港研究资助局及裘槎基金会的资助。
论文第一作者为学院硕士毕业生刘旭睿(现香港中文大学博士生)和唐瀚川,通讯作者为臧剑锋、唐瀚川及香港中文大学张立教授。
论文链接:
https://doi.org/10.1126/scirobotics.adu4851
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章




暂无评论...