
我国学者在电液驱动深海软体机器人方面取得进展







文章导读
深海高压低温下,软体机器人竟会“冻僵瘫痪”?我国学者突破性揭秘:哈尔滨工程大学李国瑞团队首创电液驱动新机制,利用静电场精准调控介电液体,让机器人在4070米深渊灵活“翱翔”!集成微型光学感知系统,实时探测冷泉区与海山区,破解软材料硬化难题。这项《Science Robotics》重磅研究,不仅实现深海低扰动探测,更开辟柔性装备新路径——立即阅读全文,解锁如何用前沿科技征服万米深渊,为矿区勘探与生态观测带来革命性方案!
— 内容由好学术AI分析文章内容生成,仅供参考。
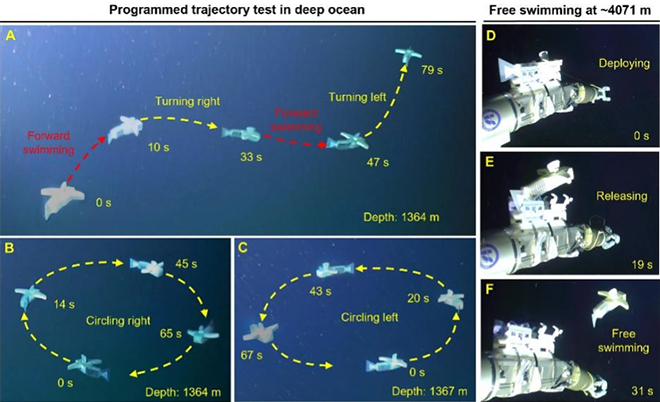
图 深海软体机器人海试应用
在国家自然科学基金项目(批准号:52088102、12472161、12102398)等资助下,哈尔滨工程大学船舶工程学院李国瑞教授课题组与合作团队在深海软体机器人领域取得进展,研制出电液驱动深海软体机器人,并在多个深海海域开展了探测应用。研究成果以“塑化电液驱动机器人深海自主翱翔(Plasticized electrohydraulic robot autopilots in the deep sea)”为题,于2025年8月14日发表于《科学·机器人》(Science Robotics)期刊上,并被《Science》官网首页大图介绍。论文链接:https://www.science.org/doi/10.1126/scirobotics.adt8054。
深海高压(约10~110 MPa)与低温(约2~4℃)极端环境诱发软材料硬化,严重制约软体驱动器大变形能力与机器人高机动性,成为深海软体机器人与柔性智能装备设计中的关键难题。与此同时,现有的深海软体机器人难以实现对环境及自身状态的实时感知,在深海复杂环境下的任务应用中面临重要挑战。
针对上述问题,团队从Maxwell电致流动经典物理现象获得启发,提出了深海软体机器人的电液驱动新机制,利用静电场调控介电液体有序流动,精确驱动柔性液压单元产生可控变形。团队进一步提出了“电液、塑化介质一体化”策略,兼具激发电液单元力电耦合大变形响应与弹性维持双重效应,显著提升了软体机器人在深海极端环境下的机动能力。此外,该机器人集成了微型深海光学感知系统,使其能够在深海极端环境下实时感知自身运动状态与环境目标,并具备近底探测能力。团队所研制的深海软体机器人成功在1369米深度冷泉区和4070米深度海山区等多个海域开展了探测应用,并展现出良好的机动性、可靠的极端环境适应性和低扰动探测能力。
该研究为深海软体机器人的大变形驱动和感知设计提供了科学支撑,探索了深海潜水器和深海软体机器人协同作业新范式,有望为深海柔性装备探测作业、深海群落原位观测以及深海矿区探测等重要需求提供前沿理论和方法革新。
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...