资源所激光雷达团队提出森林场景点云组分分割新方法







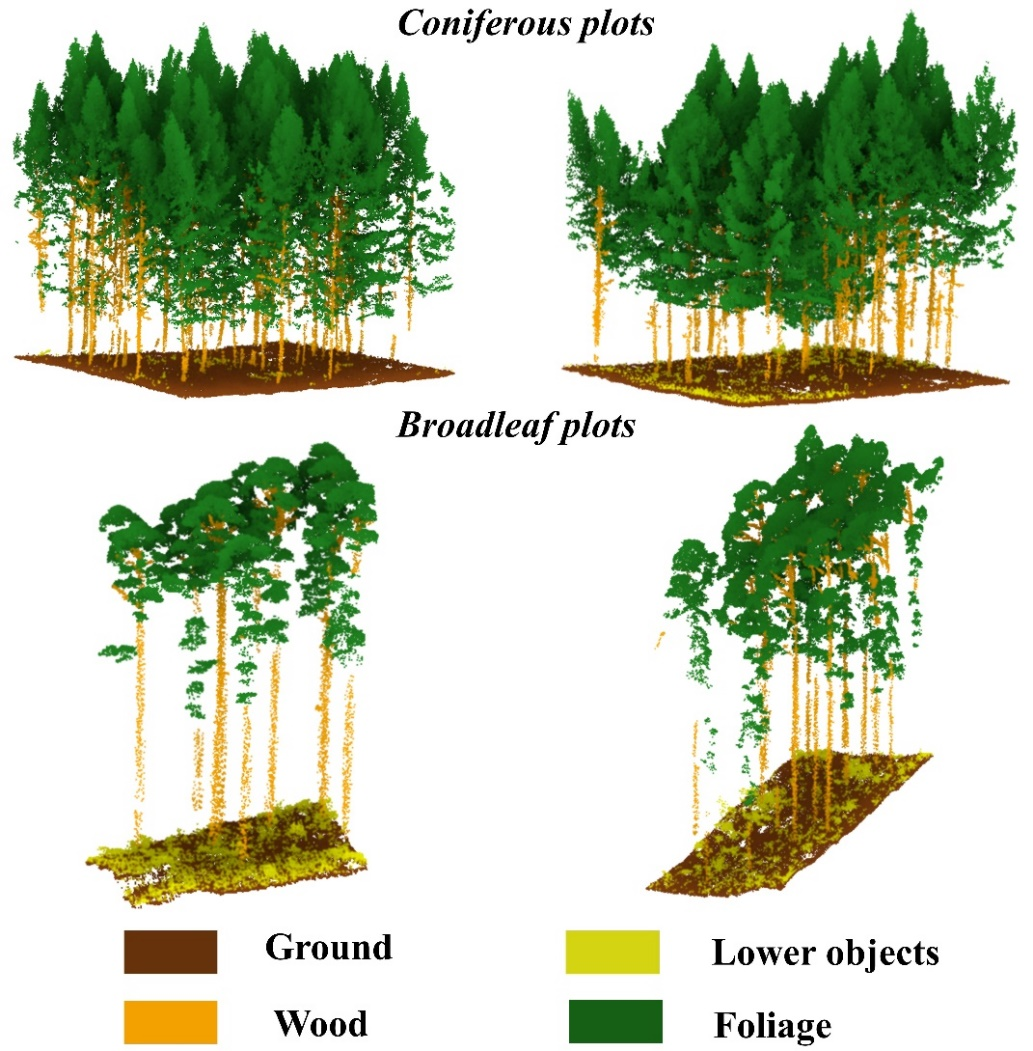
图片1:大规模数据集Lin3D示例
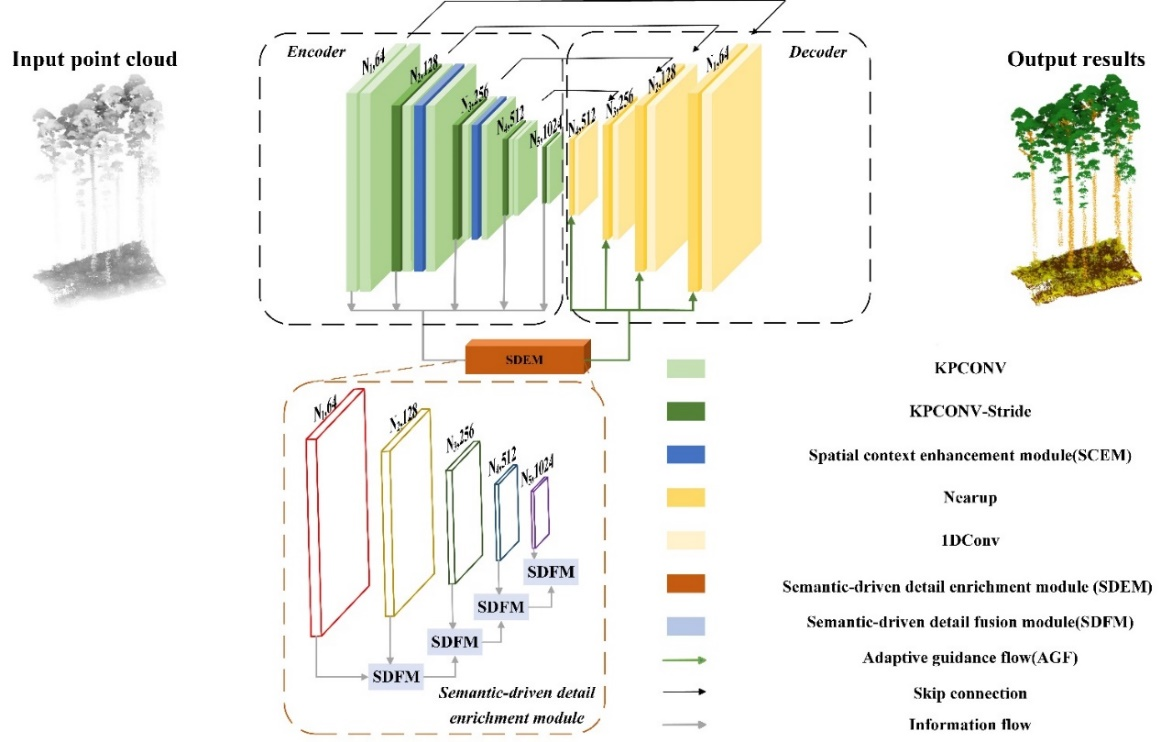
图2:Sen-net网络架构
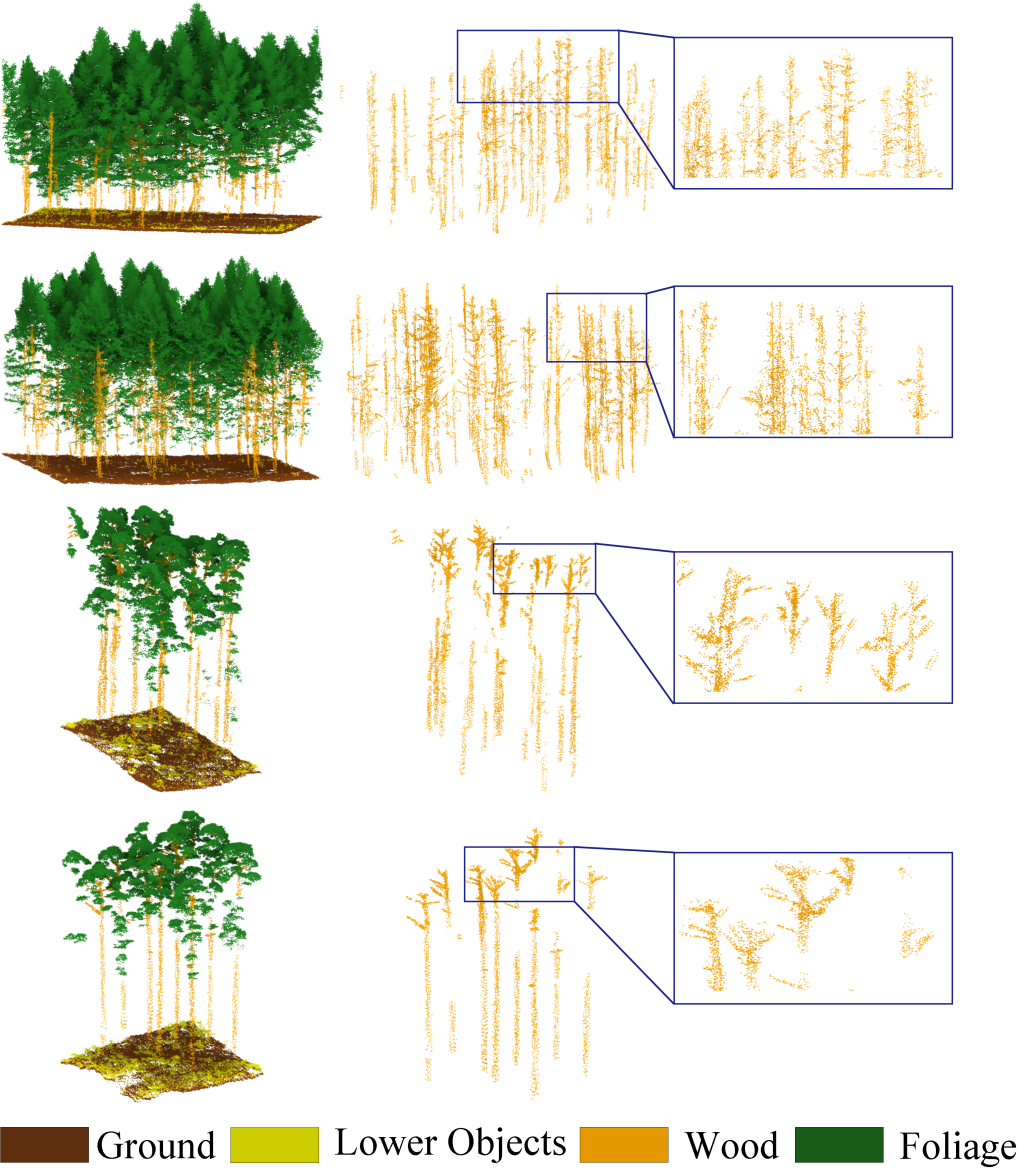
图3:Sen-net对Lin3D数据的分割结果
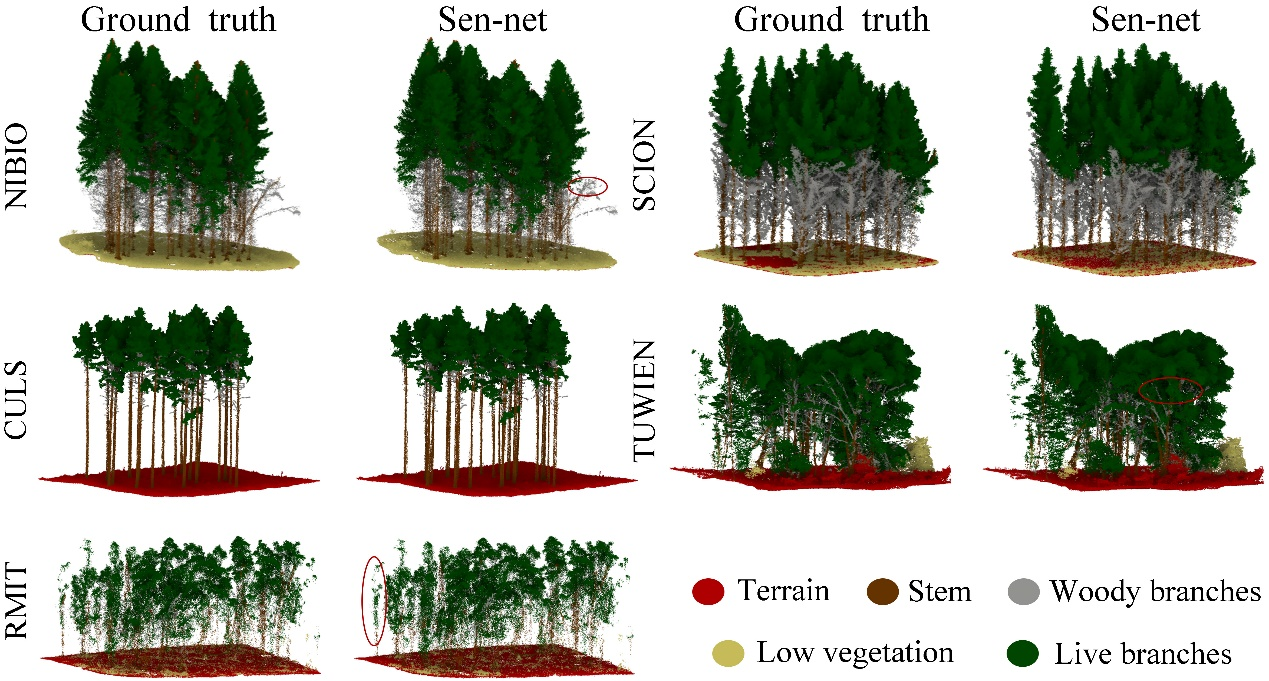
图4:Sen-net对国际公开数据的分割结果
森林场景往往具有复杂三维结构,包括林木(含树干、树枝、树叶)和其他(草、灌、地面等)多种组分,这些组分在森林生态系统中发挥不同作用。通过遥感技术测量这些成分,对定量、精确、完整地理解森林生态过程具有重要意义。无人机激光雷达(LiDAR)三维点云是进行森林三维结构刻画的有力工具,但复杂的组分和结构使点云数据难以采用传统的特征工程、启发式方法或机器学习进行高精度语义分割。
针对上述问题,资源所激光雷达遥感团队与北京林业大学合作提出了数据驱动的深度神经网络模型Sen-net,从森林场景三维点云中精准分离出树叶、木质成分、低矮植被及地面。针对国际上该领域标注数据稀缺的问题,构建了总面积超过20000 m2、包含不同气候带、森林类型、树种、林分密度、地形条件的数据集Lin3D。基于此数据集,设计和训练了专门针对森林场景三维点云理解的神经网络模型Sen-net。结合长距离上下文信息与数据集先验知识,基于语义驱动融合多尺度特征,通过自适应学习方式,有效将森林场景“端到端”地分割为树叶、木质成分、低矮植被及地面等多种组分。
团队将方法于Lin3D和国际公共数据集上进行了测试。在Lin3D数据集上,Sen-net总体正确率、平均交并比分别达到97.6%和85.1%;在其他公开数据集上,总体正确率、平均交并比分别达到94.5%和78.2%。实验结果说明Sen-net在准确性和泛化能力方面表现出色,优于同类方法。该网络无需调节参数,使用方便,泛化性高,有望被广泛用于森林场景点云分析,并作为森林场景点云处理算法的基础性框架。
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章



暂无评论...