




文章导读
你以为机器人抓取物体只需要知道力度大小就够了?实际上,正是缺少对“旋转趋势”的感知,才让无数机械臂在装配零件或拿取易碎品时显得笨拙又不可靠。西安交大与港科大的研究团队刚刚突破了这个瓶颈,他们仿生人类指尖,造出了一个能同时“感觉”压力、角度和扭矩的传感器。更惊人的是,装上它后,机器人能在蒙上眼睛的情况下,把倾斜的牛奶盒稳稳放平,甚至快速完成平衡木堆叠。这项能让机器人“手感”逼近人类的进展,其真正的颠覆性或许不在于实验室里的演示,而在于它将如何悄然重塑你未来就诊的手术台、乃至家中的服务机器人——当机器拥有了触觉,它离取代哪些精细工种又近了一步?
— 内容由好学术AI分析文章内容生成,仅供参考。
近日,西安交通大学陈雪峰教授团队通过模拟人类皮肤中触觉小体的感知特性,提出了一种名为TAP(扭矩-角度-压力)的触觉传感器。该研究成果以《扭矩感知赋予机器人类人级别的灵巧性》(Touching with torque enables human-level robotic dexterity )为题在线发表于国际学术期刊《科学进展》(Science Advances)。
指面扭矩感知不仅提供力的大小和方向,同时给出了施力点与环境的交互关系(如碰撞、平衡和阻力等),是人类使用工具、精细操作的关键基础。然而,在机器人领域,类人手的力、位置、环境的交互感知仍然是一个巨大的挑战。
为实现如人类的精细化操作,研究团队提出的TAP传感器通过单个读出通道即可在宽范围(±241.6 牛顿·毫米)内实现双向、高灵敏度(角度分辨率0.1°,扭矩分辨率0.4 牛顿·毫米)和高线性度(R²=0.99)的扭矩感知。实验表明,TAP传感器能够同时感知压力和扭转信息,响应时间约为20毫秒。将这一传感器集成到机器人控制系统中,机器人能够在无视觉条件下完成多项精细操作任务:将一个倾斜46°的牛奶盒平稳放置、在2.4秒内完成平衡木堆叠挑战(成功率81.5%),以及通过实时调整切割路径完成白萝卜切片。
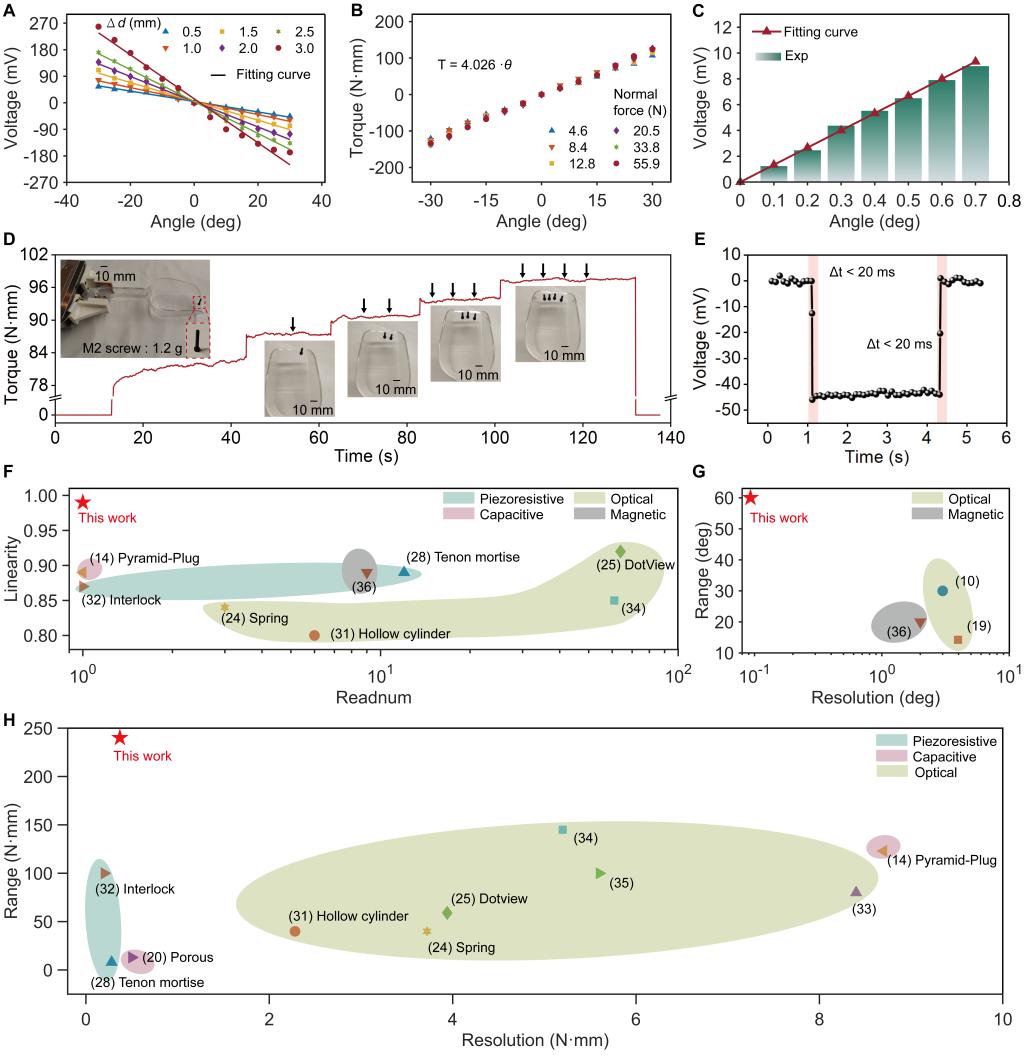
图1. TAP传感器性能标定
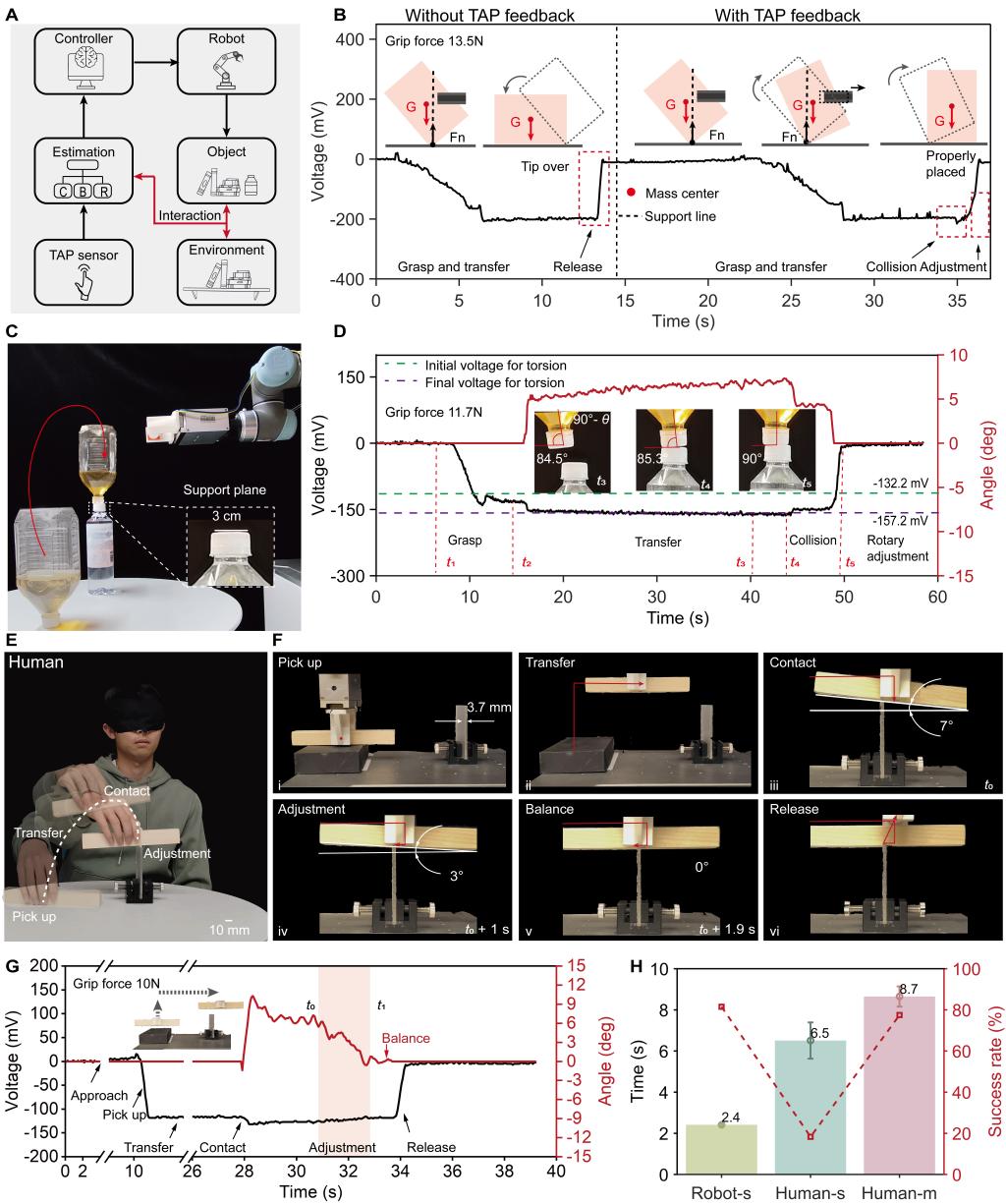
图2. 超精准放置任务
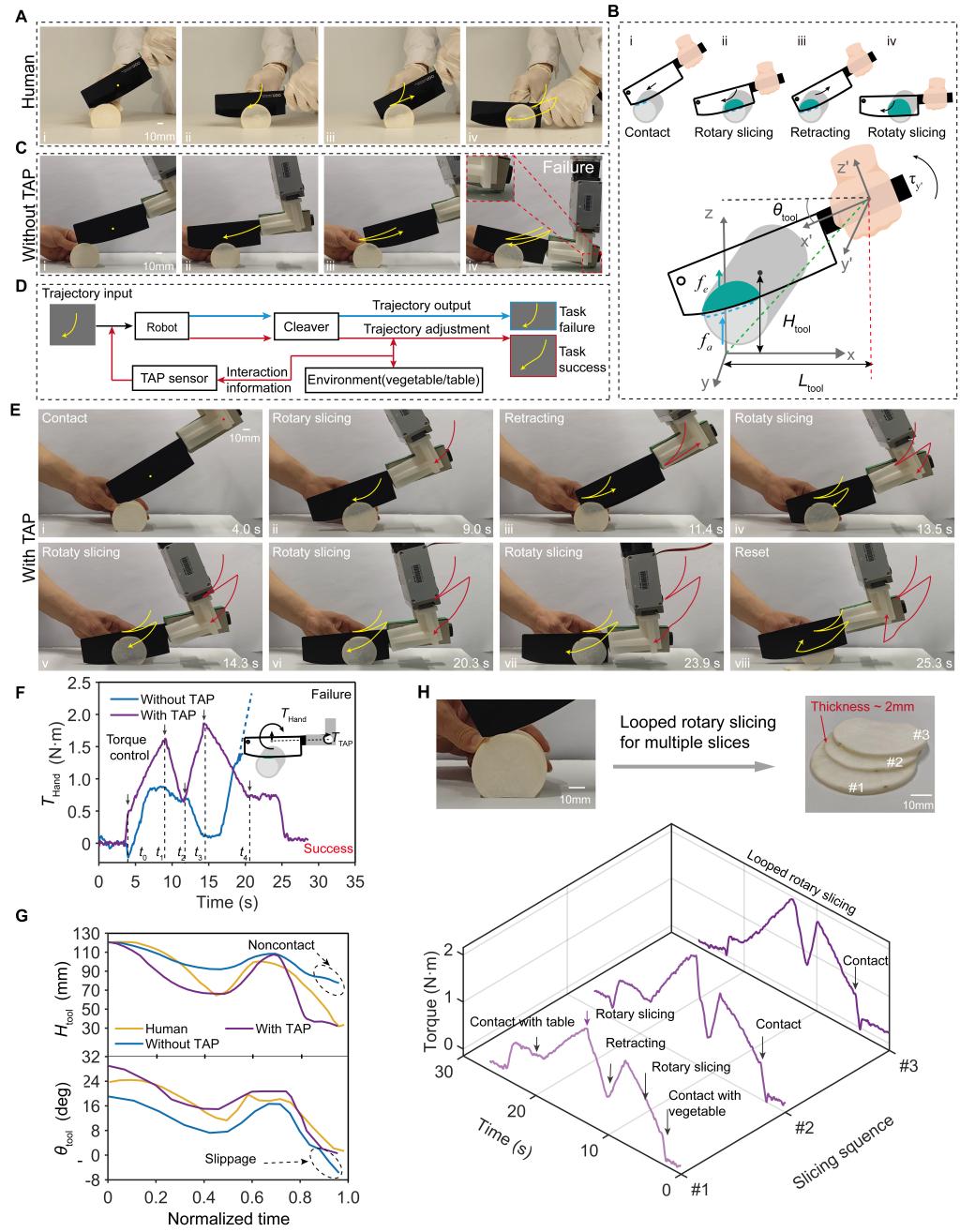
图3. 蔬菜切割任务
这一具有类人触觉感知能力的TAP传感器展示了其在精细操作领域的巨大潜力。由于其能够实时感知物体与环境交互状态的变化,TAP传感器在精密装配、医疗手术辅助、服务机器人等场景中拥有独特的优势。西安交通大学机械学院博士生汪领、孙瑜副教授、杨来浩副研究员为该论文共同第一作者;孙瑜副教授、杨来浩副研究员,香港科技大学申亚京教授为共同通讯作者。论文合作者中,陈雪峰教授为本研究提供了重要支持与宝贵建议。论文第一单位为西安交通大学。相关研究得到了国家自然科学基金等项目的资助。
文章链接:https://www.science.org/doi/10.1126/sciadv.aec3263
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章


之前搞过机械臂抓取,力反馈确实是个大难题,这个看起来靠谱
0.1°的分辨率也太牛了,感觉以后抓鸡蛋都不会碎了😂
这个能用在手术机器人上吗?