磁控微米机器人导管研究取得进展







文章导读
你是否想过,一根细如发丝的导管竟能像“磁控蛇”一样,在人体最狭窄曲折的腔道中灵活穿行?中国科学院深圳先进技术研究院最新研发的Helixoft微机器人导管,首次实现微米尺度下的无损磁控刚度调节与主动转向。它可集成至300微米微导管,刚度连续可调范围达40倍,并支持实时成像、靶向给药与组织消融。活体实验已验证其安全性和精准导航能力,或将彻底改变支气管、脑血管等微创介入手术的未来格局。
— 内容由好学术AI分析文章内容生成,仅供参考。
在支气管、脑血管、输卵管等狭窄而曲折的自然腔道中开展微创介入手术,始终是临床实践中的重大挑战。
近日,中国科学院深圳先进技术研究院在磁控微米机器人导管领域取得进展。研究团队研发出一种基于磁性螺旋形机器人的微机器人系统(Helixoft),该系统可无缝集成至商用微导管中,首次在微米尺度实现了远程且无损的磁控可编程刚度调节,并兼具主动转向能力。
为应对磁驱变刚导管在尺寸、安全性和远场操控方面的限制,Helixoft系统通过将刚性磁性螺旋结构与柔性微管相结合,实现了磁响应能力与机械顺应性的协同设计。基于“材料磁化—器件结构—磁场模式”三位一体的设计框架,研究团队构建了一种将磁驱螺旋运动与磁致弯曲相结合的解耦控制策略,在单一外部磁场作用下即可实现微导管刚度调节与主动转向的独立远程控制。
该系统专为狭窄敏感的小腔道环境而设计,可集成至直径小至300微米的商用微导管中,实现跨越40倍范围的连续刚度调节。团队通过建立描述其力学行为的理论模型,实现对Helixoft微导管运动姿态的精确预测。此外,Helixoft微导管具备良好的功能扩展性,不仅支持多节段分布式、相互独立的刚度调节,还可集成微型摄像探头、电极或激光光纤等模块,为实时成像、组织消融和多模态微创介入操作提供支持。
在多例活体动物支气管模型中,研究团队在Helixoft系统中集成了微型成像器件,结合临床影像设备与自主搭建的导管推进机构,开展了基于双模态影像引导的磁控导航与靶向药物转运实验。通过血液炎症反应检测和组织学分析等系统性评估,验证了该系统在体内应用中的可行性与安全性。同时,还完成了输卵管离体器官模型中精准取样演示。
Helixoft微机器人系统为微创介入器械提供了一种全新的“机器人赋能”技术范式。通过在单一外部磁场作用下实现器械力学性能与运动形态的实时重构,该系统有望突破传统介入工具在复杂腔道环境中的操控瓶颈。
相关研究成果发表在《自然-通讯》(Nature Communications)上。研究工作得到国家自然科学基金优秀青年科学基金项目等的支持。
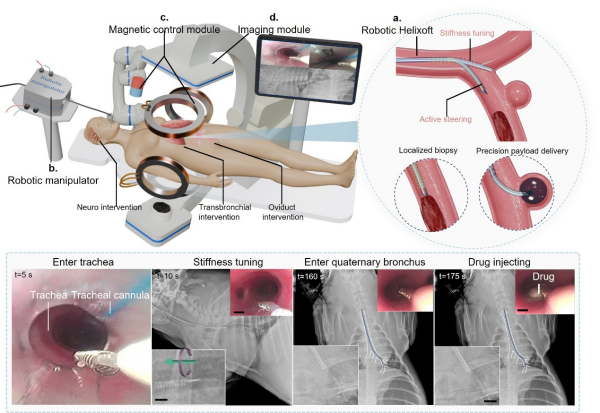
具备磁驱远程变刚和主动导航能力的Helixoft介入机器人导管
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章


这系统能扛住人体复杂腔道的摩擦不?别半路软了就尴尬了
又是中科院深圳先进院,他们搞医疗机器人有一套👍
材料磁化和结构设计这块讲得有点模糊,具体怎么解耦的?
输卵管取样都能做?妇科微创手术要变天了?
300微米也太细了,操作起来不得手抖死hhh
感觉挺那啥的,动物实验过了离人用还远吧
磁控+变刚度,是不是对磁场强度要求很高?临床环境能用吗?
之前做支气管检查差点被导管卡住,要是早点有这技术就好了
刚度还能远程调?听起来比传统导管灵活多了
这玩意真能进脑血管?有点不敢信啊🤔