






文章导读
你是否想过,未来做膝关节手术不再需要开刀,而是通过一根比头发还细的柔性机器人,精准递送激光消融病变组织?华中科技大学陶光明团队最新研发的磁控多材料纤维机器人,成功突破CO₂激光无法微创介入的难题,将激光传输与机器人运动控制集成于一根柔性纤维中,可在弱磁场下实现精准转向与瓦级激光输出。这项发表于《Science Advances》的技术,不仅在离体猪膝和活体大鼠中验证了高效消融能力,更为关节腔、脊柱乃至内窥介入手术开辟了全新路径。微创手术的极限,正在被重新定义。
— 内容由好学术AI分析文章内容生成,仅供参考。
在现代外科治疗中,激光手术刀因具备高效、精准、非接触操作等特点,已逐渐成为多种手术的首选方案。特别是位于中红外波段的CO2激光,因其对硬组织(如骨组织)具有良好的选择性吸收和高效消融能力,已在骨科领域展现出独特优势。然而,由于缺乏高性能的小尺度柔性传输介质,CO2激光无法像近红外激光一样,通过成熟的石英光纤,以微创或无创的方式进入体内,在人体深层狭窄腔道中进行介入操作。
近年来,医疗机器人的发展极大地推动了精准外科手术的进步,提高了手术器械的操作精度和效率。磁控连续体机器人凭借其远程控制、快速响应和高安全性的特点,在深入人体的复杂病理环境中已展现显著的应用潜力。然而,现有的磁控连续体机器人仍缺乏与手术操作器件的高效集成,导致其在执行组织消融等关键操作时效率不足。因此,如何以机器人化方式将CO2激光精准递送至人体深层病变区域,并实现可控、高效且安全的组织消融,已成为限制其在精准外科应用的关键难题。
近日,武汉光电国家研究中心陶光明教授团队在医疗连续体机器人领域取得了新进展,开发了一种用于精准微创膝关节手术的磁控红外激光消融纤维机器人(fiberbot)。该技术旨在通过微创方式实现在膝关节腔内的机器人化精准CO2激光手术。研究成果发表于Science Advances,题为“Magnetically actuated multimaterial fiberbot for precise minimally invasive knee laser surgery”,这项技术为关节腔微创手术提供了全新技术路径。

传统膝关节腔内手术采用关节镜辅助的开放式方式,需通过厘米级切口进行器械操作。此类方法在操控灵活性与定位精度方面存在局限,难以满足更高微创化与靶向化的需求。针对精准腔内手术需求,实现手术操作模块与运动控制功能模块在小尺度机器人器件中的高度一体化集成,并通过器件内的精细化结构设计,实现在膝关节腔内难以抵达的深度病变部位的高效率激光消融,是拓展CO2激光在精准膝关节手术应用中的关键技术挑战之一。
针对上述临床需求,研究团队开发了一种磁控多材料纤维机器人(图 1)。该机器人具有高度操控性和高效CO2激光消融能力,可通过远程磁驱动方式在复杂的膝关节腔道内执行精准、灵活转向的消融任务,其激光递送和主动转向功能分别来源于其内部多芯红外光纤和外侧磁性软涂层。
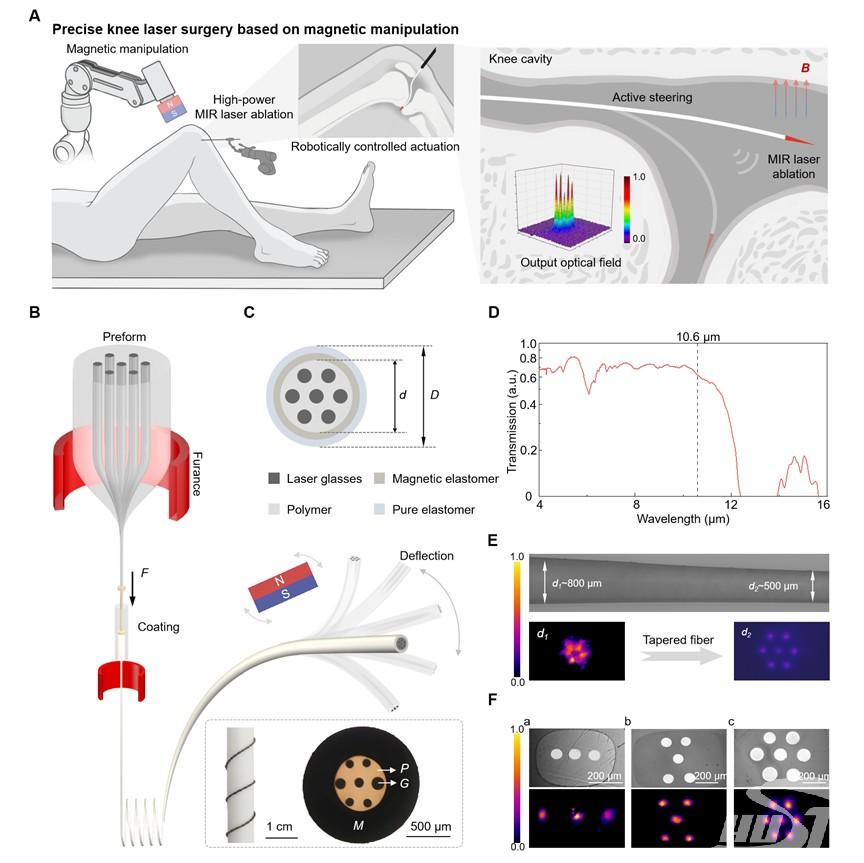
图1.用于精准膝关节激光手术的磁控多材料纤维机器人的应用场景、制备工艺及性能。(A)磁控多材料纤维机器人在膝关节红外激光手术中的应用示意图;(B)纤维机器人制备示意图:纤维热拉制、磁性软涂层涂覆及固化;(C)纤维机器人结构示意图;(D)纤维机器人红外透射光谱;(E)光纤热拉锥;(F)纤维机器人输出光场的精细化调控
研究工作的创新性主要体现在提出了一种柔性激光传能光纤微纳光学结构设计与性能调控方法,通过对内部多芯光纤激光传输通道的精细化设计与排布,实现了纤维机器人的可控光场、瓦级脉冲CO2激光功率输出,并结合多材料纤维热拉制技术,创新性提出了CO2激光传输模块与磁控机器人运动控制模块在单根纤维内的一体化集成策略。得到的纤维机器人具备高度柔韧性,实验表明,纤维机器人在经受数百次屈曲后仍能稳定传输激光。此外,纤维机器人在外部磁场作用下的响应精度高达1.5°/mT,可在低于30 mT的弱磁场下进行大角度偏转,有望降低外科医生暴露在强磁场下的安全风险。
为进一步验证纤维机器人在真实手术环境中的导航与消融运动控制功能,研究团队在离体猪膝关节内开展了激光导航与消融实验,评估其在实际生物结构中的操控稳定性与适应性(图2)。此外,在动物实验部分,研究团队依照相关伦理与实验规范,在活体大鼠股骨区域进行了点状与线性激光消融操作,验证了纤维机器人在软硬组织界面上的定位精度和组织选择性消融效果。这些实验结果为其未来在多类腔内微创手术中的临床转化提供了技术支撑。
该研究团队所开发的磁控多材料纤维机器人,在精准递送与高效激光组织消融方面实现了高度集成,为膝关节等腔内复杂结构的微创手术提供了全新解决方案。其不仅可作为传统关节镜技术的补充,更展示了在更广泛领域(如脊柱微创手术、内窥介入治疗等)的应用潜力。尽管这项技术展现出巨大潜力,但其应用于临床的进程中仍需克服多材料纤维机器人端面结构优化、手术系统的智能一体化集成和消融碎片抽吸系统开发等多重挑战。研究团队正致力于解决这些关键问题,进一步推进这一技术的应用。
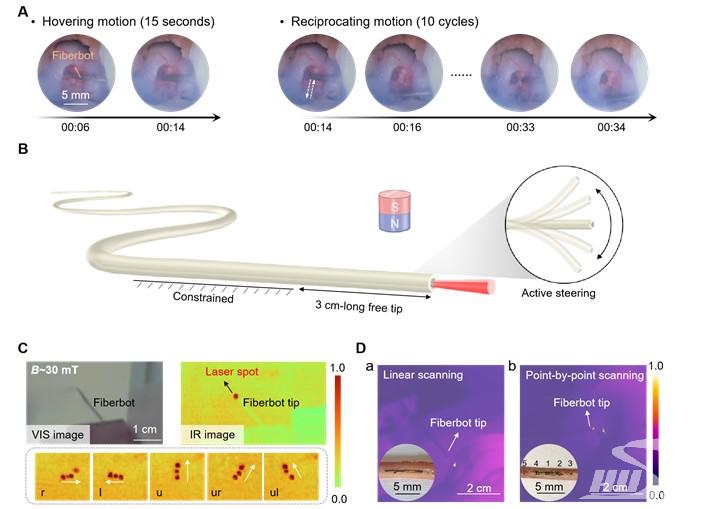
图2. 纤维机器人的主动导航与可控红外激光消融能力。(A)纤维机器人在猪膝关节腔内的消融运动控制,包括悬停和往复运动;(B)纤维机器人磁控示意图;(C)通过磁场控制的纤维机器人输出激光斑点在不同方向上的运动轨迹;(D)活体大鼠腿骨上的线性扫描消融和点对点扫描消融
武汉光电国家研究中心博士生邹郁祁、同济医学院附属同济医院刘彧副教授和山东大学集成电路学院李阳教授为论文的共同第一作者,陶光明教授为论文通讯作者。其他主要合作者还包括,首都医科大学附属北京安贞医院周宁教授,同济医学院附属同济医院刘阳副主任医师,和中国科学院上海光学精密机械研究所胡丽丽教授等。该研究得到了国家自然科学基金、华中科技大学交叉研究支持计划等项目的资助。
论文链接:https://www.science.org/doi/10.1126/sciadv.adt1809
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。





相关文章




暂无评论...